Bodenroller statt Transportwagen
Für die Zwischenlagerung oder den Transport von Tray-Stapeln innerhalb der Fertigung bietet Hirata als weitere Option für seine Palettierer eine Dockingstation für sogenannte Bodenroller an. Über diese Dockingstation lassen sich die Bodenroller mit Tray-Stapeln be- oder entladen.
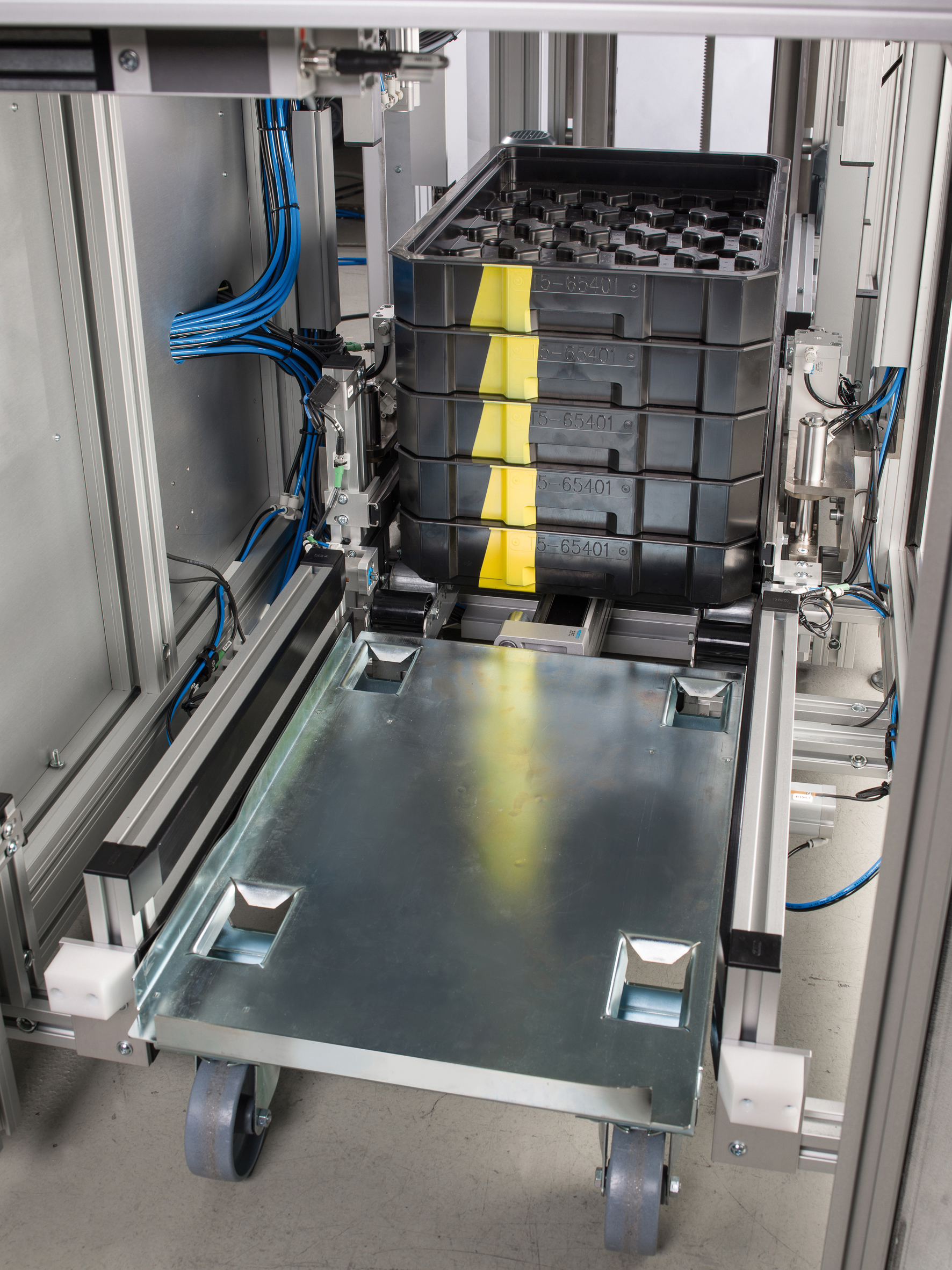
Dockingstation am Palettierer für Bodenroller (Bild: Hirata Engineering Europe GmbH)
Deren Einsatz empfiehlt sich bei begrenztem Platzangebot. Benötigen Anwender viele Transport- oder Zwischenlagermöglichkeiten, ist das Nutzen von Bodenroller anstelle von Transportwagen auch in wirtschaftlicher Hinsicht attraktiver. Die Dockingstation ist für Tray-Größen von 600x400mm verfügbar.











