Konzept für mehr Flexibilität in Verpackungs- und Palettierprozessen
Größtmögliche Raumausnutzung
Roboter haben großes Potenzial für die Realisierung von flexiblen Automatisierungslösungen. Insbesondere Knickarmroboter erlauben komplexe Bewegungen in einem kugelförmigen Arbeitsbereich rund um den Roboter. So lassen sich vielfältige Handlingaufgaben im Zusammenhang mit der Automatisierung von Verpackungs- und Palettierprozessen flexibel und raumsparend umsetzen.
Das Robot-Flexline-Konzept bietet hohe Flexibilität auf engem Raum. (Bild: Transnova-Ruf GmbH)
Roboter stellen eine zuverlässige und wartungsarme Komponente dar. Zudem lassen sie sich über eine komfortable HMI relativ einfach flexibel programmieren, was sie zu sehr anpassungsfähigen Instrumenten macht. Diese Merkmale der Robotertechnik nutzt Transnova-Ruf, um mit dem Robot-Flexlinekonzept Best-in-Class-Lösungen hinsichtlich Flexibilität und Raumnutzung zu realisieren. Kern des Konzeptes ist dabei ein modularer Baukasten aus Funktionsbaugruppen und unterschiedlichen Robotertypen, die sich spezifisch für die jeweiligen Projektanforderungen zu einer Applikation konfigurieren lassen. Jede Maschine oder Anlage ist somit Design-to-Order, d.h. maßgeschneidert auf die jeweiligen Kundenbedürfnisse.
Bestmögliche Raumausnutzung
Viele produzierende Unternehmen, die vorhaben, ihre Endverpackungsprozesse bis hin zur Palettierung zu automatisieren, stehen vor der Herausforderung, dass die räumlichen Gegebenheiten hierfür bereits durch andere Maschinen und Prozesse belegt sind und der verfügbare Raum begrenzt ist. Angebote von der Stange sind hier in der Regel nur ein suboptimaler Kompromiss. Das Robot-Flexlinekonzept hingegen erlaubt es, mehr aus der Raumsituation herauszuholen. So sind roboterbasierte Verpackungsanlagen hinsichtlich der Flexibilität konventionellen Anlagen in der Regel überlegen. Bei den heutigen Rahmenbedingungen in den Märkten mit zunehmend heterogenen Verbraucherbedürfnissen, zunehmender Produktvielfalt und schrumpfenden Losgrößen substituiert eine Roboteranlage hinsichtlich Format- und Verpackungsschemaflexibilität nicht selten mehrere konventionelle Anlagen. Stehende und liegende Produkte im Tray bzw. Tray-Deckel, ein Wraparound-Karton, paralleles Verpacken in E2-Kisten für die Intralogistik und nur 5x2m Platz – mit dem Robot-Flexlinekonzept lässt sich all das bewerkstelligen. Anstelle mehrerer, schlecht ausgelasteter konventioneller Maschinen sorgen wenige hochflexible Roboterverpackungsanlagen dafür, den Maschinenpark für die Endverpackung innerhalb einer Fabrik zu verschlanken.

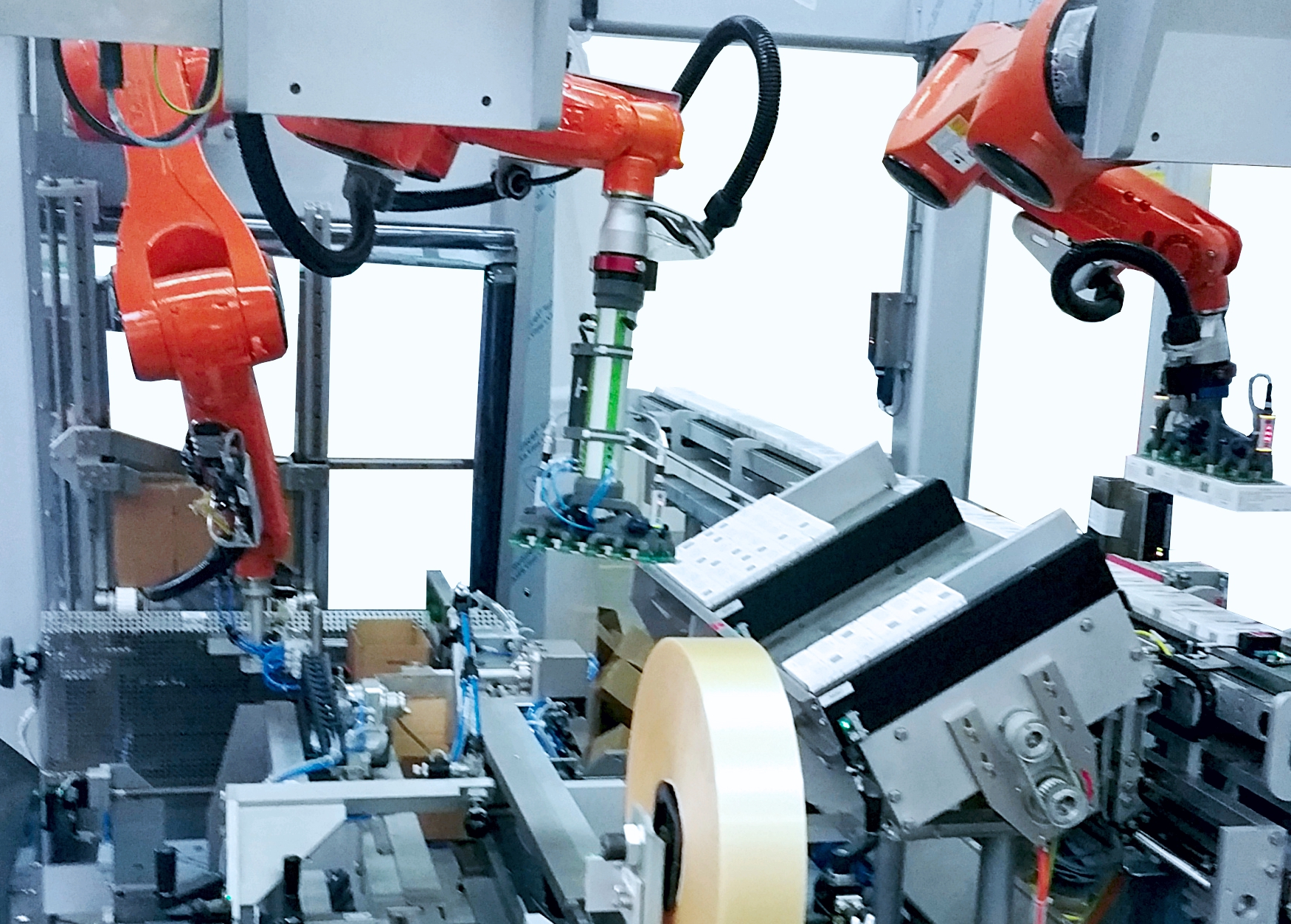
Der Einsatz von Knickarmrobotern erlaubt durch den kugelförmigen Arbeitsbereich eine gute Raumausnutzung. (Bild: Transnova-Ruf GmbH)
Multi-Tasking für den Roboter
Aber auch die jeweilige Verpackungsmaschine an sich kann mithilfe der Robotertechnik raumoptimiert designed werden. Ein Ansatzpunkt hierfür ist das Multitasking für den Roboter. Hierbei ist er je nach Auslastungssituation in der Lage, mehrere Funktionen zu übernehmen. So lassen sich das Kartonaufrichten, das Produktgruppieren oder das Kartonbefüllen mit nur einem Roboter umsetzen. Das lässt sich unter Umständen sogar gleich für einen mehrstufigen Verpackungsprozess (z.B. Innen- und Außenkarton oder Kartonieren und Palettieren) oder für alternative Kartonformate parallel innerhalb einer Roboterzelle umsetzen. Die Kunst liegt dabei neben der großen Erfahrung in der Roboterprogrammierung insbesondere im Design von smarten Multifunktionswerkzeugen. Ein weiterer Ansatzpunkt ist die Anordnung der einzelnen Funktionsbaugruppen einer Verpackungsmaschine im Raum. Gegenüber konventionellen Konzepten erlauben die Bewegungsflexibilität der Robotertechnik und die Modularität des Robot-Flexlinekonzept hohe Freiheitsgrade bei der räumlichen Gestaltung. Der Roboter fährt die Stationen flexibel an, sodass sie sich frei innerhalb des kugelförmigen Roboterarbeitsbereiches verteilen lassen. So kann bei der Anlagenlayoutplanung voll auf die räumlichen Gegebenheiten und die prozessbedingten Anforderungen eingegangen werden. Produktzulauf, Kartonabgabe, Verpackungsmaterialzuführung, Bedienerseite oder Wartungszugänge lassen sich variabel und auf den Kunden zugeschnitten konzipieren.











