Roboter in Manufaktursystemen
Gut geplant zur MRK
Roboter zeichnen sich durch Konstanz und Präzision aus. Aufgaben, die für den Menschen unangenehm sind, übernehmen sie verlässlich auch im Dauerbetrieb. Mit modernen Ansätzen der Mensch/Roboter-Zusammenarbeit kommen sie dem Mitarbeiter aber immer näher. Dann ist eine sorgfältige und applikationsspezifische Planung unerlässlich.
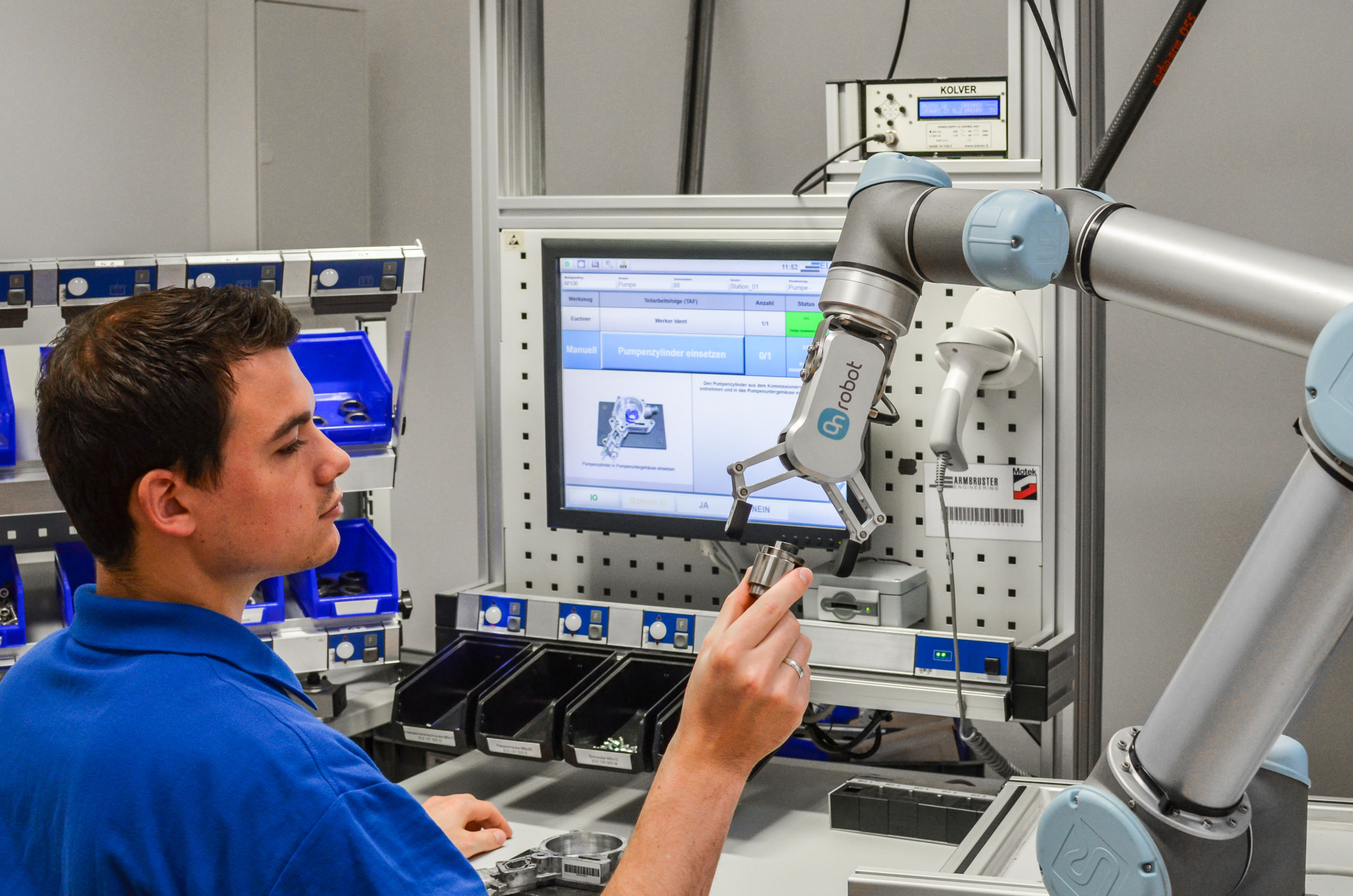
Bild: Armbruster Engineering GmbH & Co. KG
Die Entwicklung neuer Leichtbauroboter macht es möglich, im kollaborierenden Betrieb eingesetzt zu werden. Um dabei Schaden von den Mitarbeitern abzuwenden, ist es wichtig, den Kontakt zwischen Roboter und Mensch so schnell wie möglich zu detektieren und Maßnahmen wie den Stopp der Motoren oder eine Ausweichbewegung einzuleiten. Somit müssen kollaborierende Roboter spezielle Sicherheitsfunktionen erfüllen. Um die entstehenden Drücke somit Kraft pro Fläche möglichst zu verringern, sollten alle Teile des Roboters gerundete Kanten haben. Nicht nur die physische, sondern auch die psychische Belastung muss berücksichtigt werden, denn Mitarbeiter können sich durch schnelle und unvorhersehbare Bewegungen eines Roboters irritieren lassen. Stress und Fehlerhäufigkeiten nehmen zu. Auch hier ist die Begrenzung von Leistung und Kraft wesentlich. In jedem Fall muss vor dem Einsatz eines kollaborierenden Roboters eine Risikoanalyse durchgeführt werden. Nach einer umfassenden Planung kann der Roboter dann angelernt (geteacht) oder programmiert werden. Anwendungsfelder für kollaborierende Roboter lassen sich entlang der gesamten Prozesskette identifizieren: @Aufzählung:Fertigung: Monotones Be- und Entladen einer Maschine @Aufzählung:Kommissionierung: Auffüllen der Regale @Aufzählung:Montage: Montage in Zwangslage @Aufzählung:Messen und Prüfen: Qualitätskontrolle am Ende der Linie @Aufzählung:Verpackung: Stapeln und Palettieren
Beispiel einer 360°-Montageinsel
Mitarbeiter, die auf einer 360°-Montageinsel im One-Piece-Flow montieren, können bei Leistungsspitzen durch Leichtbauroboter entlastet werden. In diesem Beispiel könnte ein Roboter Teile aus einer Maschine entnehmen und dem Montagemitarbeiter auf einem Förderband bereitstellen. An einer weiteren Station könnte ein Roboter Teile in eine Vorrichtung einlegen, diese betätigen und wieder entnehmen. Dafür müssen die Teile in einem Magazin angeliefert werden. Je nach Aufgabe werden bestimmte Kräfte und Freiheitsgrade benötigt. Tätigkeiten, die auf einen Menschen ausgelegt sind, sollten die Kraft von 15daN nicht überschreiten. Somit sollte ein Roboter, der für den kollaborierenden Bereich bestimmt ist, eine Traglast bis 15kg besitzen. Die Anforderungen an die Traglast können je nach Anwendungsfall auch geringer sein. Der Roboter benötigt mindestens sechs Achsen, um beliebige Orientierungen des Endeffektors im Raum zu erhalten und den Bewegungsraum des menschlichen Arms nachzuempfinden.
Eigenschaften unterschiedlicher Robotermodelle
Es kann aus zahlreichen Robotern unterschiedlicher Hersteller gewählt werden. Sie unterscheiden sich in der Ausführung und Programmierung somit im Preis und in der Verbreitung. Manche sind eher für den Dauereinsatz mit hohen Stückzahlen, andere für den schnellen und zeitlich begrenzten Einsatz geeignet. Der eine ist auch durch Werkstattpersonal schnell und einfach zu programmieren, der andere kann dafür komplexere Bewegungen durchführen. Mit der ELAM-Software von Armbruster Engineering werden Roboter und andere steuerfähige Geräte an ein Manufaktursystem angebunden und betrieben. Wobei es unerheblich ist, ob der Teilprozess vom Roboter oder Mitarbeiter durchgeführt wird. In jedem Fall wird das Ergebnis dokumentiert und wenn vom Mitarbeiter ausgeführt, tritt automatisch die Assistenzanzeige in den Vordergrund. Die Auftragseinleitung kann durch ein ERP-System erfolgen.











