EU-Projekt zum Thema Soft Manipulation bei Service- und Industrierobotern
Zarte Roboterhände
Die menschliche Hand ist ein einzigartiges Konstrukt. Wie sie Dinge greift und dabei ihre Umwelt integriert, um möglichst schnell und problemlos an das gewünschte Objekt zu gelangen, ist beeindruckend. Forschern der TU Berlin ist es nun gelungen, Roboter mit Greifern aus Silikon auszustatten, die der menschlichen Hand nachempfunden sind.

Schwierig nachzubauen: Die menschliche Hand ist sehr komplex und in der Lage, eine Vielzahl komplizierter Bewegungen auszuführen. (TU Berlin, Raphael Deimel)
Die Forscherinnen und Forscher der Fakultät IV Elektrotechnik und Informatik der Technischen Universität Berlin konnten beim Horizont-2020-Programm der Europäischen Union überzeugen: Mit dem Projekt Soma (Soft Manipulation) zählen das Konsortium, bestehend aus mehreren europäischen Partnern aus Forschung und Industrie, zu den Bewerbern, die über die nächsten vier Jahre Förderung erhalten.
Die menschliche Hand – ein komplexes Konstrukt
Eine menschliche Hand gleitet ohne Mühe über die Tischplatte, um einen Schlüsselbund schneller griffbereit zu haben. Der Handballen dient als Stütze beim Kartoffelschneiden. Das Umblättern einer Buchseite, das Öffnen des Drehverschlusses einer Flasche, ein Zeigefinger, der zum improvisierten Schuhlöffel wird – all dies sind Bewegungen, die der Mensch mit seiner Hand tagtäglich mit großer Effizienz und Geschicklichkeit ausführt, meist ohne darüber nachzudenken. Diese Bewegungen haben die Soma-Forscher bereits in der Vergangenheit genauer unter die Lupe genommen. Ziel des Projekts ist es, neuartige Robotersysteme dazu zu befähigen, auf eine Weise mit ihrer Umwelt zu interagieren, die an den menschlichen Umgang mit Alltagsgegenständen angelehnt ist.
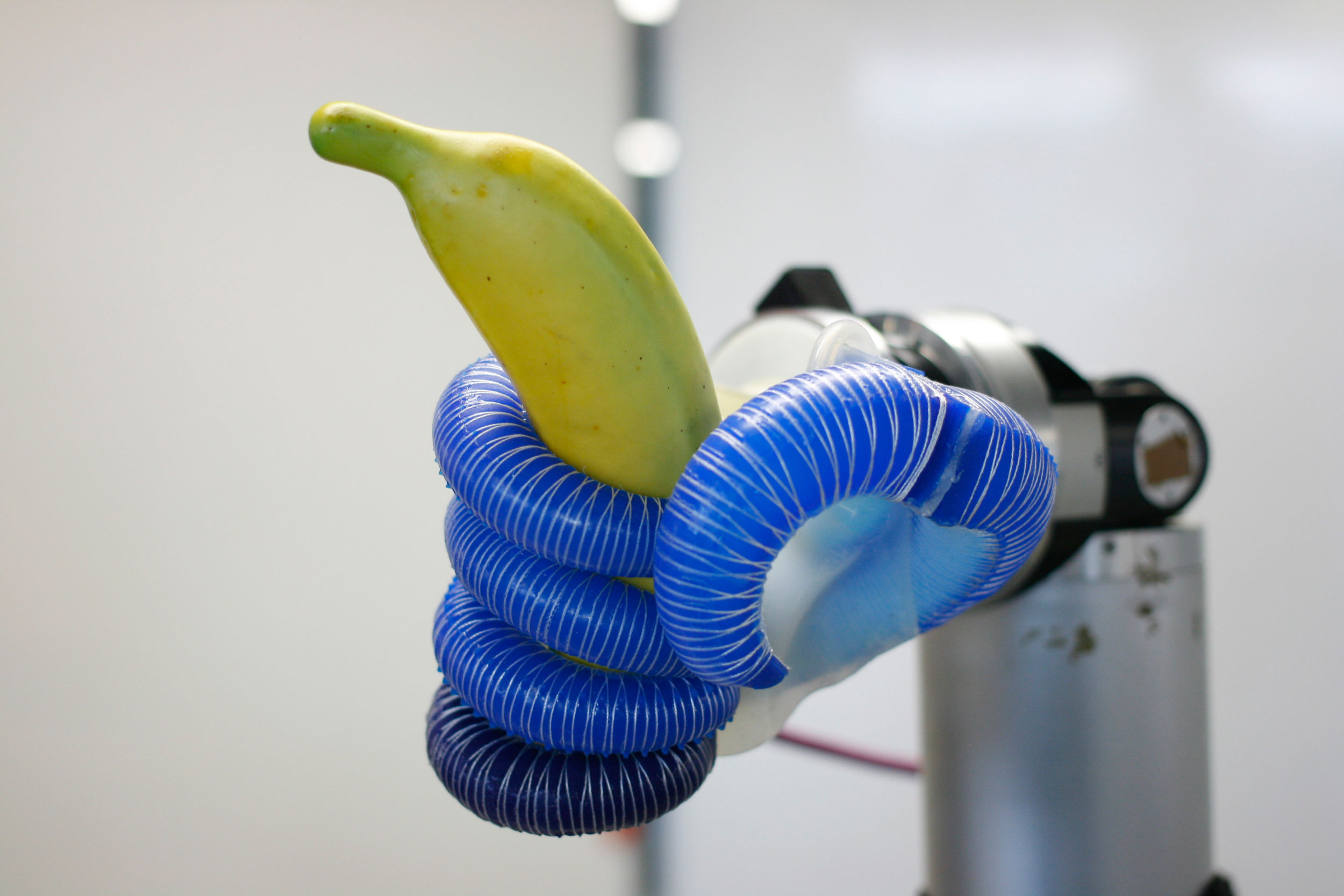
Mit den neu entwickelten Roboterhänden aus Silikon lassen sich Objekte greifen, ohne Druckstellen zu hinterlassen. (TU Berlin, Raphael Deimel)
Roboterhände aus Silikon
Im Mittelpunkt steht die Entwicklung weicher Roboterhände, die ihre Umwelt in ihre Aktionen und Greifbewegungen einbeziehen. Die an der TU Berlin entwickelte ‚RBO Hand 2‘ besteht zu großen Teilen aus weichem Silikon, wodurch sich neue Möglichkeiten ergeben: Objekte lassen sich aufgreifen, ohne Schäden wie Druckstellen oder Kratzer zu hinterlassen, und die Hand lässt sich viel flexibler einsetzen. Im Hintergrund arbeiten Computerprogramme, die dafür sorgen, dass die Umwelt nicht länger ein Hindernis darstellt, sondern als Mittel dient, schneller und leichter zum Ziel zu kommen, so wie es beim Menschen auch der Fall ist. Diese Herangehensweise stellt eine radikale Neuausrichtung auf dem Forschungsgebiet dar. Bisher wurden hauptsächlich Roboterhände aus Metall hergestellt, die tausende Euro kosten und mithilfe komplexer Algorithmen nach harten Gegenständen greifen. Die Herstellungskosten der ‚RBO Hand 2‘ liegen bei circa 300 bis 400€ und damit deutlich unter denen der Pendants aus Metall. Um die weichen Hände, die an der TU Berlin gebaut werden, auf ihre Anwendbarkeit zu testen, bestehen Kooperationen mit Industriepartnern. Mögliche Einsatzbereiche liegen in der Industrie und in der Servicerobotik.











