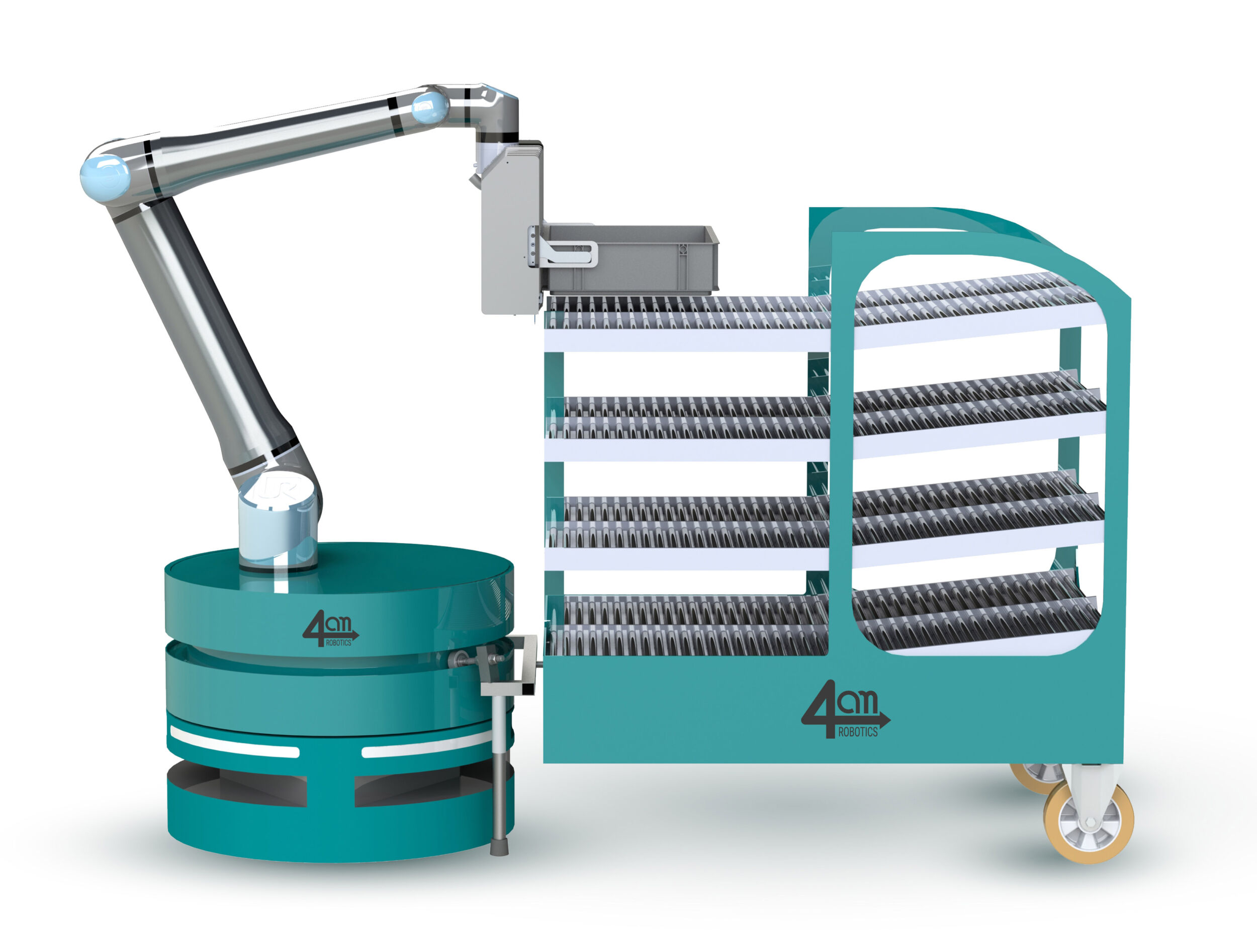
Die United Robotics Group hat gemeinsam mit dem Tochterunternehmen und Integrator MR Mobile Robots ein neues, flexibles Palettiersystem entwickelt.
Bild: United Robotics Group GmbH
Bild: United Robotics Group GmbH

Palettierlösung für die Intralogistik
mehr lesen