Antriebstechnik für fahrerlose Transportsysteme
Nabtesco präsentierte auf der SPS IPC Drives 2016 ein fahrerloses Transportsystem, das von Zykloidgetrieben angetrieben wird. Hier kommt ein Antriebskonzept zum Einsatz, das sich durch hohe Drehzahlen, eine robuste Konstruktion und eine verbesserte Hauptlagerung für hohe Radiallasten auszeichnet.
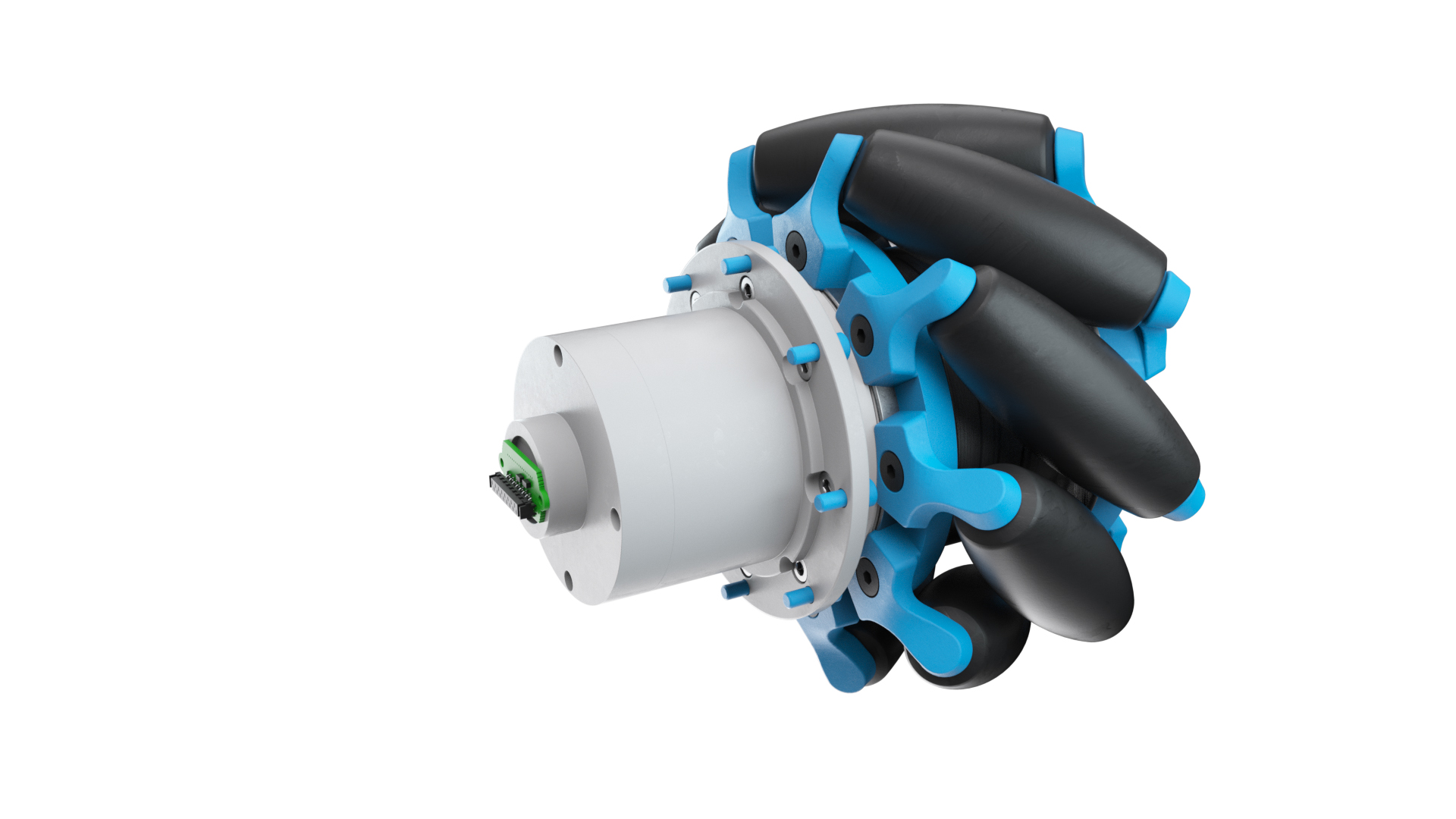
(Bild: Nabtesco Precision Europe GmbH)
Aufgrund der Kompaktheit lassen sich die Getriebe auch bei Applikationen einfach integrieren, in denen nur wenig Bauraum zur Verfügung steht. Das fahrerloses Transportsystem setzt auf einen modularen Baukasten aus Getriebe, Motor, Servoregler, Encoder und Rad. Das vollintegrierte und dezentrale Antriebskonzept, bei dem alle erforderlichen Komponenten in der Radeinheit integriert sind, bietet dem Anwender hohe Gestaltungsfreiheit bei der Konstruktion von FTS-Lösungen. Das kompakte Antriebssystem arbeitet wartungsfrei und verfügt über einen Aufbau, der hohe Radiallasten erlaubt. Ebenso groß ist die Flexibilität, was die Adaption der Antriebseinheit in das Steuerungskonzept des Fahrzeugs angeht. Als Kommunikationsschnittstellen stehen Ethernet, Ethercat, Profinet und CAN zur Verfügung, weitere Standards wie Ethernet/IP oder Powerlink sind auf Anfrage möglich.











