Bin Picking mit 75 Bildern pro Sekunde
Durch die hohe Verarbeitungsgeschwindigkeit von bis zu 75 Bildern/s und Bildgrößen von bis zu 5Mio. 3D-Farbpunkten (X, Y, Z, R, G, B und Oberflächennormale) eignet sich die vierte Generation des RoboPickers von Robovis für Anwendungen wie Pick&Place, Bin-Picking, CAD-Vergleiche, Berechnungen von CAD-Oberflächenabweichungen, Lack- und Oberflächeninspektion oder messtechnische Anwendungen auf metallischen und nicht-metallischen Oberflächen.
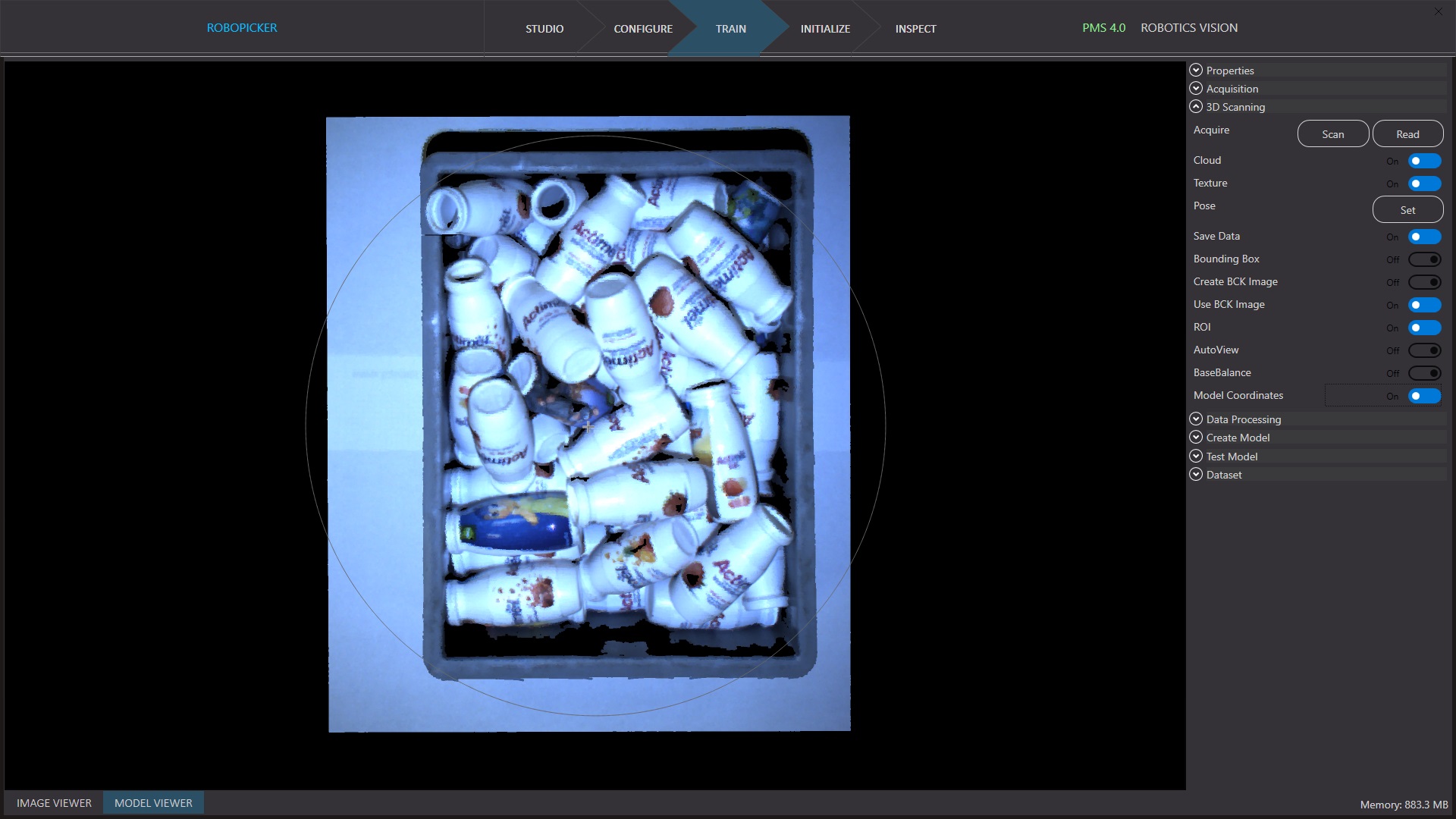
Bild: Robovis GmbH
Der Sensor wird mit dem Softwarepaket PMS 4.0 geliefert, um hochgenaue 3D-Punktewolken und 3D-Modelle auch von sehr komplexen Objektoberflächen zu erzeugen. Unterschiedliche Objekthöhen werden mit realen Abmessungen im Nahbereich (0,4 bis 3,0m) ohne Stufeneffekt oder Oberflächenversatz gescannt.











