Dünne und sichere Schwebesauger
Schmalz hat zwei neue Schwebesauger entwickelt. Während der SBS Thin auch in beengten Automationsprozessen seinen Platz findet, verhindert der SBS-ESD durch ableitfähige Elastomerpuffer eine unkontrollierte elektrostatische Entladung. Der SBS Thin ist 2mm hoch, hat einen Durchmesser von 20mm und erzeugt eine Haltekraft von 3N. Neben glatten Oberflächen greift er auch leicht strukturierte Werkstücke und ist damit für die Handhabung von Leiterplatten, gebohrten PCBs und Wafern geeignet. Da der SBS Thin nicht durch das zu greifende Objekt durchsaugt, ist er ebenso für das Vereinzeln von dünnen, porösen Werkstücken geeignet. Ähnliches gilt für den SBS-ESD.
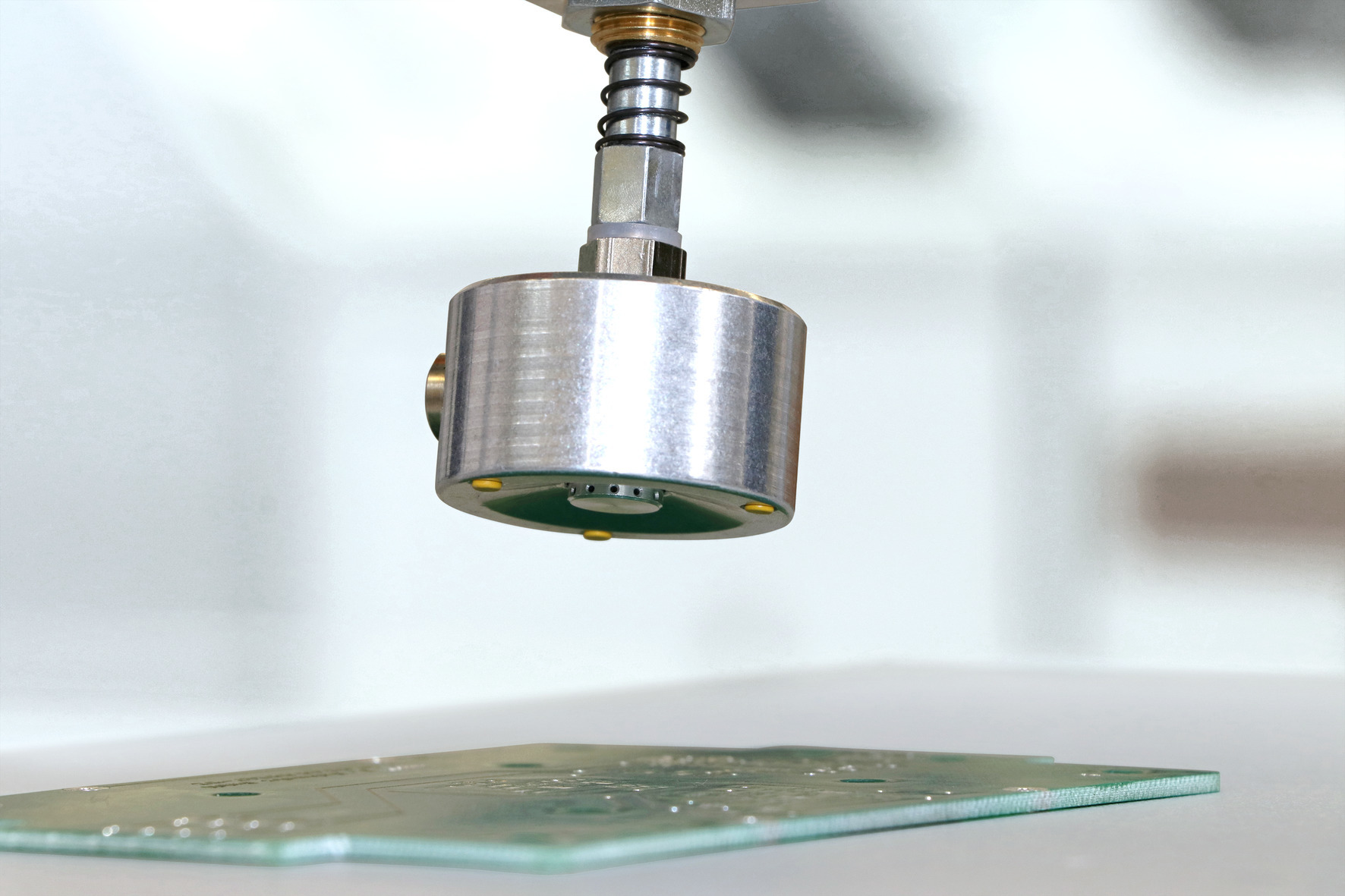
Bild: J. Schmalz GmbH
Schmalz hat den Schwebesauger so ausgestattet, dass er empfindliche Werkstücke nicht durch unkontrollierte elektrostatische Entladung beschädigt. Dafür sorgen ableitfähige Elastomerpuffer aus dem Spezialwerkstoff NBR-ESD an der Saugerunterseite. Wie auch bei der Standard-Version nehmen diese mögliche im Handhabungsprozess auftretende Querkräfte auf. Der SBS-ESD ist in fünf Größen erhältlich und erzeugt Haltekräfte zwischen 1 und 18,5N. Typische Einsatzgebiete sind neben dem Greifen von Leiterplatten auch das Vereinzeln von Zwischenlagen beim Be- und Entladen von Nassprozessanlagen oder das Handling von Innenlagen für Multilayer Boards. Beide Sauger können zudem dünne Kupferfolien schonend handhaben.











