Demonstrator für Mensch/Roboter-Kollaboration
Hand in Hand
Die steigende Kundennachfrage nach individualisierten Produkten führt zu einer Erhöhung der Anzahl an Produktvarianten. Diese Variantenvielzahl zusammen mit schwankenden Märkten und verkürzten Produktlebenszyklen erfordert flexible Produktionsanlagen, die auch auf kurzfristige Änderungen im Produktionsplan reagieren. Die Mensch/Roboter-Kollaboration (MRK) bildet hier einen Ansatz für eine flexiblere Automatisierung, denn im Gegensatz zu voll automatisierten Anlagen arbeiten Mensch und Roboter im gleichen Arbeitsraum produktiv zusammen.

Arbeitsbereich einer Lösung für die Mensch/Roboter-Kollanboration. (Bild: Fraunhofer IGCV)
Bei der Mensch/Roboter-Kollaboration lassen sich die Stärken des Menschen, wie motorische Fähigkeiten oder die Kognition, und die Stärken des Roboters, wie Präzision und Ausdauer, vereinen. Besonders für kleine und mittelständische Unternehmen bietet die MRK Potenziale, da dort eine Vollautomatisierung aufgrund der kleinen Losgrößen meist nicht wirtschaftlich ist und deshalb die Montage in vielen Fällen rein manuell erfolgt. Die Anwendung von Mensch/Roboter-Kollaboration ist derzeit auf vielfältige Weise Gegenstand von Untersuchungen, jedoch ließ sich eine breite Anwendung noch nicht realisieren. Die Gründe dafür liegen vor allem in den hohen Sicherheitsanforderungen und der Frage nach einer geeigneten Aufteilung der Arbeitsinhalte zwischen Mensch und Roboter begründet. Ziel ist, dass der Mensch weder über- noch unterfordert ist, der Roboter hingegen aber auch weitestgehend ausgelastet ist, um die Wirtschaftlichkeit der Applikation sicherzustellen. Um Aspekte der Mensch/Roboter-Kollaboration zu untersuchen, bauten Mitarbeiter des Fraunhofer IGCV einen Demonstrator für MRK-Anwendungen.
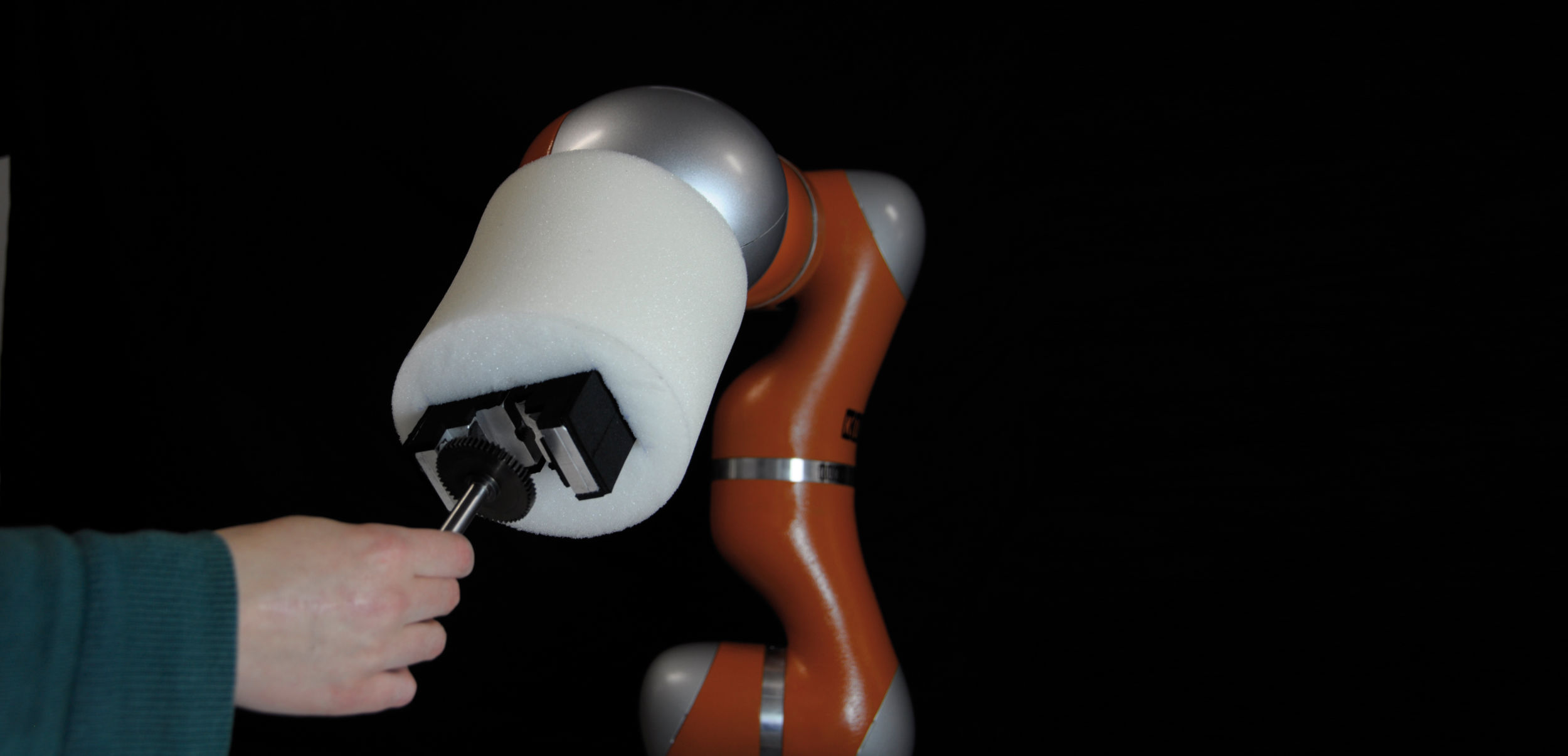
Der Greifer des MRK-Demonstrators ist mit einem Schaumstoff-Zylinder ummantelt, der als Eingriffschutz in den Greifer dient und eine Kollision mit dem Menschen abdämpft. (Bild: Fraunhofer IGCV)
Arbeitsaufteilung in der Mensch/Roboter-Kollaboration
Als Ziel der Mensch/Roboter-Kollaboration gilt vor allem die Erhöhung der Produktivität durch das gemeinsame Ausführen einer Aufgabe. Der Mensch soll dabei von monotonen Aufgaben entlastet werden, die ein Roboter übernehmen kann. Der Roboter hingegen soll eine gewisse Auslastung erreichen, um die Wirtschaftlichkeit zu gewährleisten. Die Arbeitsinhalte der Montageaufgabe aufzuteilen, sodass sich die Ziele erreichen lassen, stellt eine große Herausforderung in der Planung der Mensch/Roboter-Kollaboration dar. Prinzipiell ist es möglich, dem Roboter alle Aufgaben zuzuteilen, die sich automatisieren lassen. Zur Untersuchung der Automatisierbarkeit ist es erforderlich, sowohl das zu montierende Produkt als auch die unterschiedlichen Prozesse zu prüfen. Dazu werden sowohl das Produkt als auch der zugehörige Prozess auf mehrere Kriterien hin bewertet. Dazu gehören die Formlabilität oder die Fügerichtung. Den Kriterien lassen sich Ausprägungen zuordnen, die über einen Durchschnittswert die Automatisierbarkeit durch einen Roboter darstellen. Da es jedoch sinnvoll ist, dass beide Partner der Kooperation weitestgehend ausgelastet sind und dass die Aufgaben des Menschen nicht bloß die vom Roboter übrig gebliebenen Aufgaben sind, ist die prinzipielle Durchführbarkeit durch den Roboter nicht gleichbedeutend damit, dass er die Aufgabe später auch tatsächlich ausführt. Unter Beachtung der automatisierbaren Tätigkeiten sind daher die Aufgaben so zu verteilen, dass sich die Gesamtzeit der Durchführung durch eine Parallelisierung von Aufgaben zwischen Mensch und Roboter so kurz wie möglich halten lässt.

Arbeitsablauf mit aufteilung zwischen Mensch und Roboter (Bild: Fraunhofer IGCV)
Aufbau des Demonstrators
Um die Anwendung der MRK in der Montage und damit verbunden die Aufteilung der Arbeitsinhalte zu untersuchen, wurde am Fraunhofer IGCV ein MRK-Anwendungsfall implementiert. Dafür wählten die Mitarbeiter die Montage eines Demo-Getriebes aus. Als Roboter für den Aufbau des Demonstrators steht derzeit ein LBR 4+ von Kuka und als Greifer ein Zweibacken-Parallelgreifer von Sommer zur Verfügung, wobei die Backen an die Anforderungen des Getriebes angepasst wurden. Da der Greifer scharfe Kanten aufweist und eine Quetschung des Menschen beim Eingriff nicht ausgeschlossen ist, war eine weitere Anpassung nötig, um den Sicherheitsanforderungen in einer MRK-Applikation zu genügen und den Demonstrator im Forschungsumfeld einsetzbar zu machen. Dafür ummantelten die Mitarbeiter den Greifer mit einem Schaumstoffzylinder, der einerseits als Eingriffsschutz dient und andererseits eine Kollision mit dem Menschen abdämpft. Hierbei handelt es sich derzeit um eine Übergangslösung, bis sich ein neuer, sicherer Greifer beschaffen lässt. Zur Montage des Getriebes wird zunächst das Gehäuseunterteil definiert platziert, woraufhin das Einsetzen der Wellen erfolgt. Anschließend wird das Gehäuseoberteil aufgesetzt und verschraubt. Die Mitarbeiter umwickeln und kartonieren hierauf das fertig montierte Getriebe. Zur Aufteilung der Arbeitsinhalte erfolgte zunächst die Untersuchung des Produkts und des Prozesses auf Automatisierbarkeit hin. Daraus ergeben sich als vom Roboter durchführbare Aufgaben das Platzieren des Gehäuseunterteils, das Einsetzen der Zahnräder, das Aufsetzen und das Verschrauben des Gehäusedeckels. Das Verpacken ist aufgrund der formlabilen Folie nicht für die Automatisierung geeignet. Daher übernimmt der Mensch diese Aufgabe. Der Roboter wäre zwar in der Lage, alle Aufgaben außer das Verpacken zu übernehmen. Eine zeitliche Abschätzung der Tätigkeiten von Mensch und Roboter zeigt aber, dass die Durchführungszeiten des Roboters deutlich länger sind als die des Menschen, wenn er alle Aufgaben außer dem Verpacken und der Montage von Temperatursensor und Dichtung übernimmt. Um die Gesamtbearbeitungsdauer zu verringern, erhielt der Mensch zusätzlich die Aufgabe des Verschraubens des Getriebes. Hierfür wurden dort ein mit Kabeln versehener Temperatursensor und eine formlabile Dichtung ergänzt. Die Montage des Getriebes bis auf das Verschrauben erfolgt am gleichen Ort. Hier bringt der Mensch auch den Sensor, den O-Ring und die Dichtung ein. Beim Einlegen des O-Rings und des Sensors in das Getriebe greift er somit in den Arbeitsbereich des Roboters. Das Verschrauben des Getriebes erfolgt an einer weiteren Station direkt neben dem Arbeitsbereich des Roboters. Um Kollisionen zwischen Mensch und Roboter beim Eingriff in dessen Arbeitsbereich zu vermeiden, planen die Mitarbeiter des Projekts im Weiteren eine kamerabasierte Kollisionsvermeidung mithilfe eines LeapMotion Controllers zu realisieren. Dabei detektiert die LeapMotion die Hände im Arbeitsraum des Roboters und bestimmt ihre Position. Befinden sich die Hände in der Nähe des Endeffektors des Roboters, pausiert er das Programm, wartet bis sich die Hände aus dem Bereich entfernt haben und führt anschließend das Programm weiter aus.
Fazit und Ausblick
Der Demonstrator steht zur Untersuchung von MRK-Anwendungen im Forschungs-, aber auch im industriellen Umfeld zur Verfügung. Das Fraunhofer IGCV unterstützt Firmen bei der Analyse ihrer Montage auf den potenziellen Einsatz der MRK mithilfe einer dafür entwickelten Methodik. Stationen, für die sich im Rahmen der Potenzialstudie ein möglicher Einsatz identifizieren ließ, lassen sich am Demonstrator prototypisch umsetzen und evaluieren. Forschungsseitig lässt sich der Demonstrator beispielsweise um eine Kinect erweitern, um größere Bereiche des Körpers zu detektieren und somit Kollisionen zu vermeiden. Darüber hinaus stellt die möglichst einfache und intuitive Programmierung des Roboters ein aktuelles Forschungsthema dar.











