Automatisierte Klebe- und Prüfzellen Kleb dir eine Weil der Bedarf an Batterien weltweit wächst, ist es erforderlich, die Stückzahlen zu steigern und die Kosten zu senken. Automatisierte Klebe- und Prüfzellen können die Taktzeiten verkürzen und die Qualität durch zahlreiche integrierte Prüfschritte steigern. Länger als 80s darf die komplette Bearbeitung...
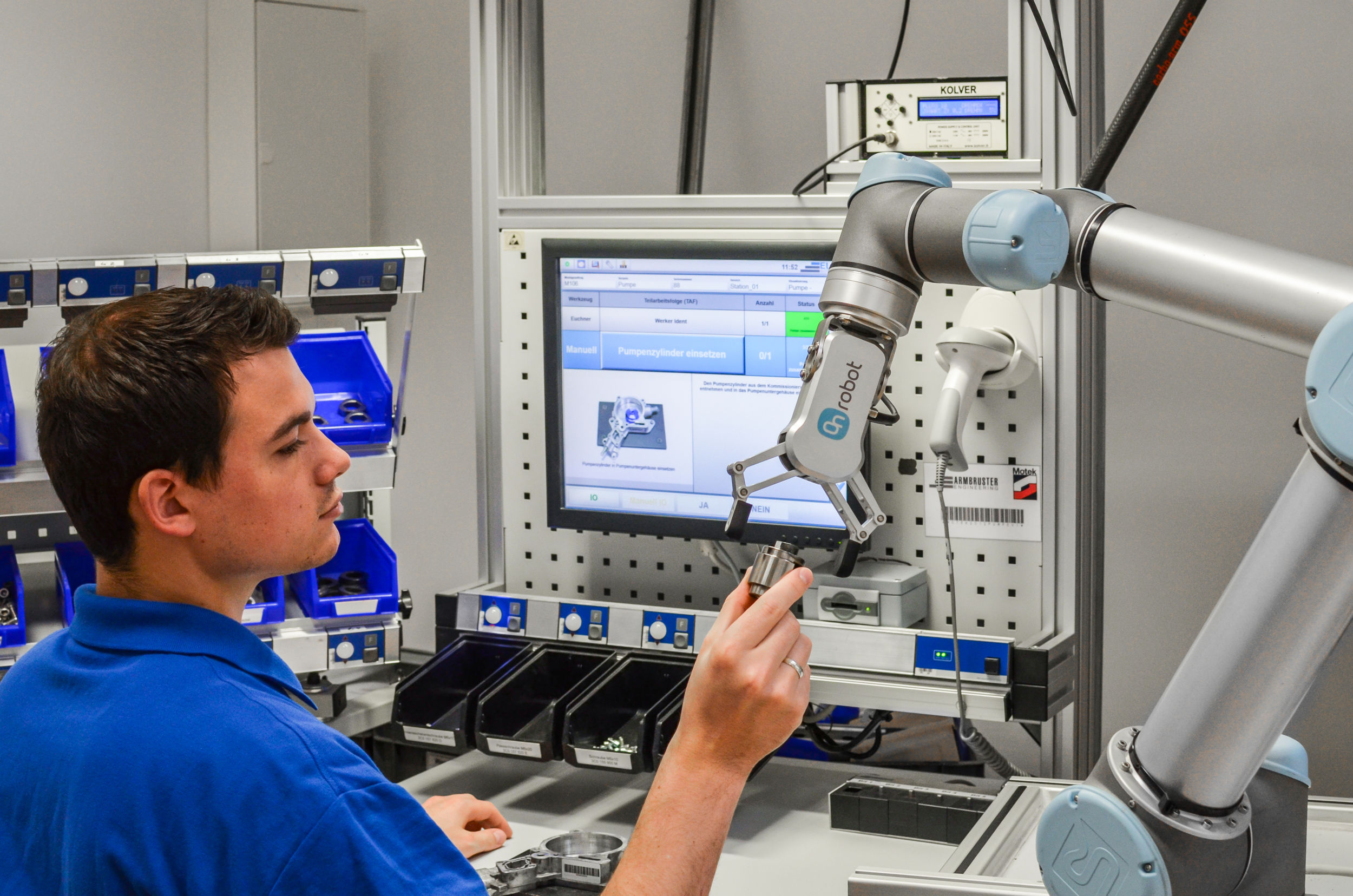
Bei der Batterieproduktion kommen manuelle und automatisierte Verarbeitungsschritte zum Einsatz. (Bild: Zwerrenz Automatisierungstechnik GmbH)
Bei der Batterieproduktion kommen manuelle und automatisierte Verarbeitungsschritte zum Einsatz. (Bild: Zwerrenz Automatisierungstechnik GmbH)

Automatisierte Klebe- und Prüfzellen
mehr lesen