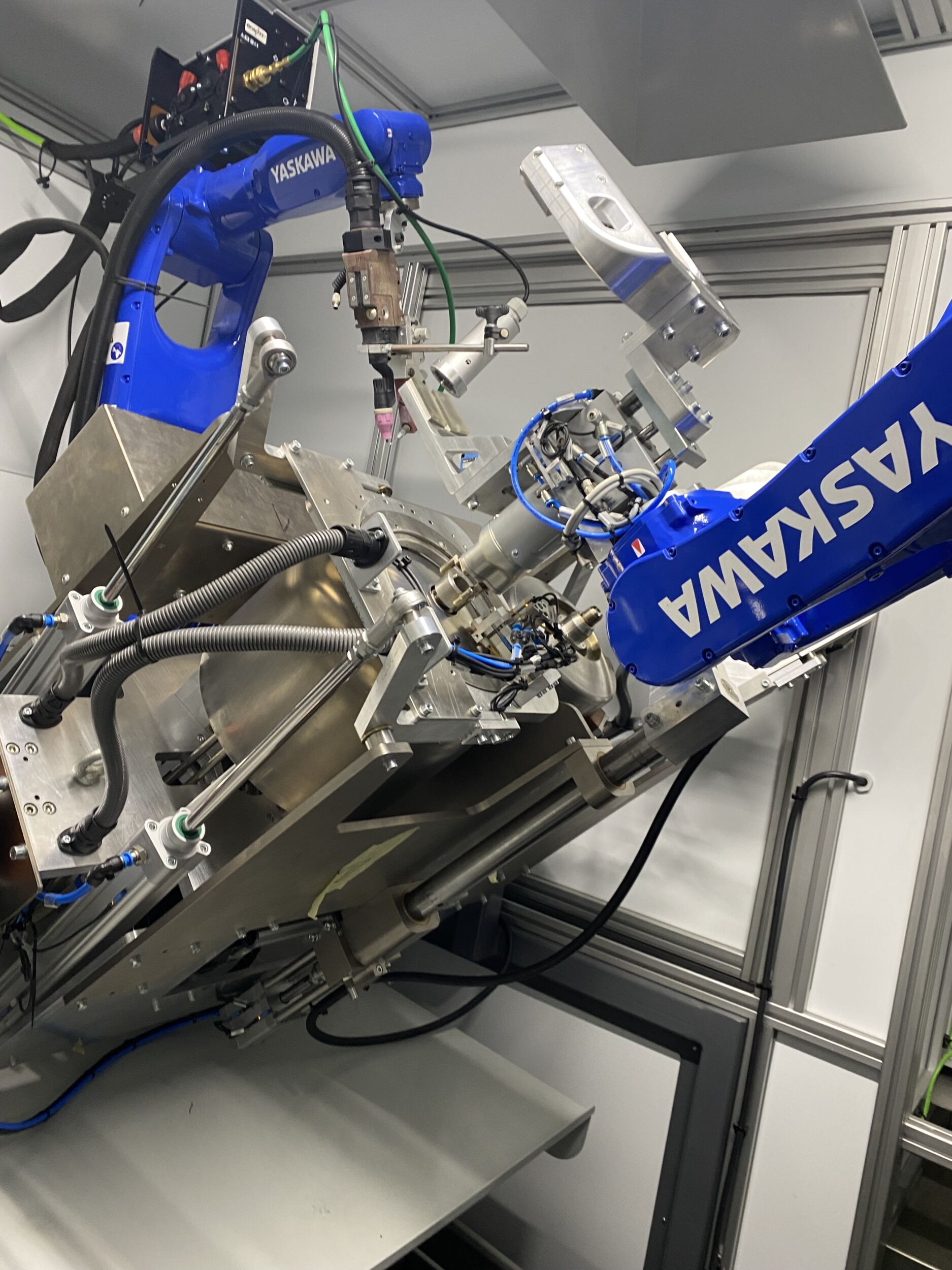
Akeo Plus hat eine Roboterzelle zur Fertigung von Satellitenpanels beim Luft- und Raumfahrtunternehmen Thales Alenia Space entwickelt.
Bild: Akeo Plus
Bild: Akeo Plus

Roboterzelle zur Fertigung von Satellitenpanels
mehr lesen
Akeo Plus hat eine Roboterzelle zur Fertigung von Satellitenpanels beim Luft- und Raumfahrtunternehmen Thales Alenia Space entwickelt.

In der Landwirtschaft war man bisher stark auf Handarbeit angewiesen.

Der Pumpenhersteller Scherzinger fertigt zwei Gehäuse und zwei Deckel von Flügelzellenpumpen zur Trockensumpfschmierung aus Aluminiumguss.

Mit dem Handscanner GoScout3D haben Forschende des Fraunhofer IOF einen mobilen Sensor entwickelt, der die hochauflösende 3D-Vermessung komplexer Objekte ermöglicht.

Zum dritten Mal sind die Cobots von Kassow Robots auf dem Hannover-Messe-Stand des Mehrheitseigentümers Bosch Rexroth präsent.

Die robotergeführten Depalettieranlagen für Kleinladungsträger von Polyplan ermöglichen eine zuverlässige und schnelle, automatisierte Entladung von Paletten – auch bei hoher KLT-Typenvielfalt – sowie eine positionsgenaue Umsetzung der entnommenen Kisten auf Stellplätze oder Fördersysteme.

ABB hat auf der diesjährigen Logimat die neueste Generation KI-gestützter Robotiklösungen gezeigt, darunter den autonomen mobilen Roboter Flexley Tug T702, den ersten einer ganzen Reihe von mobilen ABB-Robotern mit Visual-SLAM-Navigation.

IAR, Anbieter von Software und Dienstleistungen für die Entwicklung von Embedded-Systemen, arbeitet jetzt mit NexCobot, einem Anbieter von Steuerungslösungen für Roboter, zusammen.

Basler erweitert sein Produktportfolio um die 3D-Kameraserie Stereo visard.

Auf der diesjährigen Embedded World hat BlackBerry sein neues Modell eines Roboterarms präsentiert, der auf der QNX Software Development Platform 8.0 basiert und für medizinische Umgebungen entwickelt wurde.

Der Anlagenbauer Stiwa Automation hat sein Portfolio um sogenannte Standard-Performance-Anlagen erweitert.

Wie können wir in naher Zukunft Roboter vollständig in unser tägliches Leben integrieren? Dieser Herausforderung widmet sich das Unternehmen Enchanted Tools. Gegründet von Jérôme Monceaux, der bereits an der Entwicklung der Roboter Pepper und Nao beteiligt war, stellte das Startup kürzlich Miroki vor, den Prototyp einer neuen Generation humanoider Roboter. Für seine Bewegungen kommen bürstenlose Motoren und Planetengetriebe von Maxon zum Einsatz

Die Roboter Mario und Nette von Kuka sind als Puppenspieler ins Augsburger Rathaus eingezogen. Hinter Glas steuern sie den aus der Augsburger Puppenkiste bekannten Kasper und den Drachen Famulus. Die Attraktion war bis Ende Januar dieses Jahres im Rathaus zu sehen.

Die ToF-Kamera DMV-TM von Delta Electronics ist speziell für den Einsatz an Cobots und fahrerlosen Transportsystemen sowie autonomen mobilen Robotern entwickelt worden. Ihre sehr kompakten Maße betragen 10×3,5cm. Sie ermöglicht 30fps bei einem Blickwinkel von 105×78° und einer Reichweite bis 4m.
Bei Alugas werden täglich rund 1.000 Muffen automatisiert verschweißt.

Der Roboterpalettierer High-Speed Robot System der HRS-Series von Trapo fungiert in der Ausführung in U-Line als eigenständige Palettierzelle und kann in jeder Produktionsumgebung installiert werden.

Programmierung von Schweiß- und Verfahrwegen sowie Sensorroutinen an 3D-Modellen: Sie möchten Ihre Anlagenauslastung steigern, den Fertigungsprozess optimieren und Ihre Schweißfertigung flexibilisieren? Während in der Roboteranlage die Produktion läuft, kann gleichzeitig in RoboPlan ein neues Programm erstellt werden.

EK Robotics hat auf der diesjährigen Logimat u.a. die Transportroboter Vario Move L und Vario Move CB gezeigt.

Bota Systems stellt mit dem Modell T5 eine hochsensible Version seines Kraft/Momenten-Sensors SensOne vor.

Wenn es um die Produktion von Radialwellen-Dichtungsringen geht, ist eine intelligente Greiflösung unerlässlich, denn der Greifer muss Dichtungsringe mit verschiedenen Maßen flexibel handhaben. Der Hersteller Kaco setzt hierbei auf einen IO-Link-Greifer von Zimmer, der letztendlich die Produktion effizienter und schneller macht.

Weniger Fachkräfte, mehr Schwankungen im Auftragseingang und immer individuellere Kundenanforderungen: Diese Faktoren beeinflussen die Fertigungsplanung zunehmend. Gerade bei kleinen Fertigungschargen mit Losgrößen unter 100 macht in diesem Spannungsfeld die Automatisierung den Unterschied. Ein entscheidender Ansatzpunkt findet sich hierbei auch im Rüst- und Spannprozess.

Bei der Handhabung biegeschlaffer Werkstücke treten am Produkt Verformungen auf, die die Automatisierung seit Jahrzehnten vor ein Problem stellen. Eine weitere Herausforderung, die das prozesssichere Greifen von Stoffen bisher nahezu unmöglich macht, ist das Vereinzeln von Stofflagen voneinander. So findet die Maschinenbestückung und -entnahme in der Textilindustrie meist manuell durch eine Person statt. Diese nicht wertschöpfenden Tätigkeiten und Blindprozesse können nun durch die Greiferlösungen von Robotextile automatisiert werden.

In der Robotik finden Kleinstantriebe von Faulhaber durch ihre hohe
Leistungsdichte in zahlreichen Anwendungsbereichen Verwendung, z.B. bei Kleinteilegreifern oder elektrischen Werkzeugwechslern.

Das fahrerlose Transportsystem FFTigv von FFT ist in drei Varianten erhältlich.

Nach zwei Jahren rasanten Wachstums von insgesamt 57% erzielte Igus in 2023 einen Umsatz in Höhe von 1,14Mrd.€.

Die globale Umfrage ‚ABB Automotive Manufacturing Outlook Survey‘ – in Auftrag gegeben von ABB Robotics und Automotive Manufacturing Solutions (AMS) – zeigt: Steigende Energiekosten in Europa und die ausufernden Lohnkosten in den USA zählen zu großen Herausforderungen für die Automobilindustrie.

Kuka und Volkswagen haben eine Rahmenvereinbarung über die Lieferung von mehr als 700 Robotern in diesem und den kommenden beiden Jahren geschlossen.

Cenit hat die 3D-Simulationssoftware Fastsuite E2 aktualisiert und überarbeitet.

Vision On Line ist jetzt offizieller Vertriebs- und Systempartner des italienischen Unternehmens Ars Automation.