Etikettierung per Cobot
Mithilfe des Hermes-Q-Systems von Cab lässt sich die Etikettierung von Verpackungen mittels kollaborativem Roboter durchführen. Das System stellt alle erforderlichen Schnittstellen für die Integration in ein Netzwerk zur Verfügung.
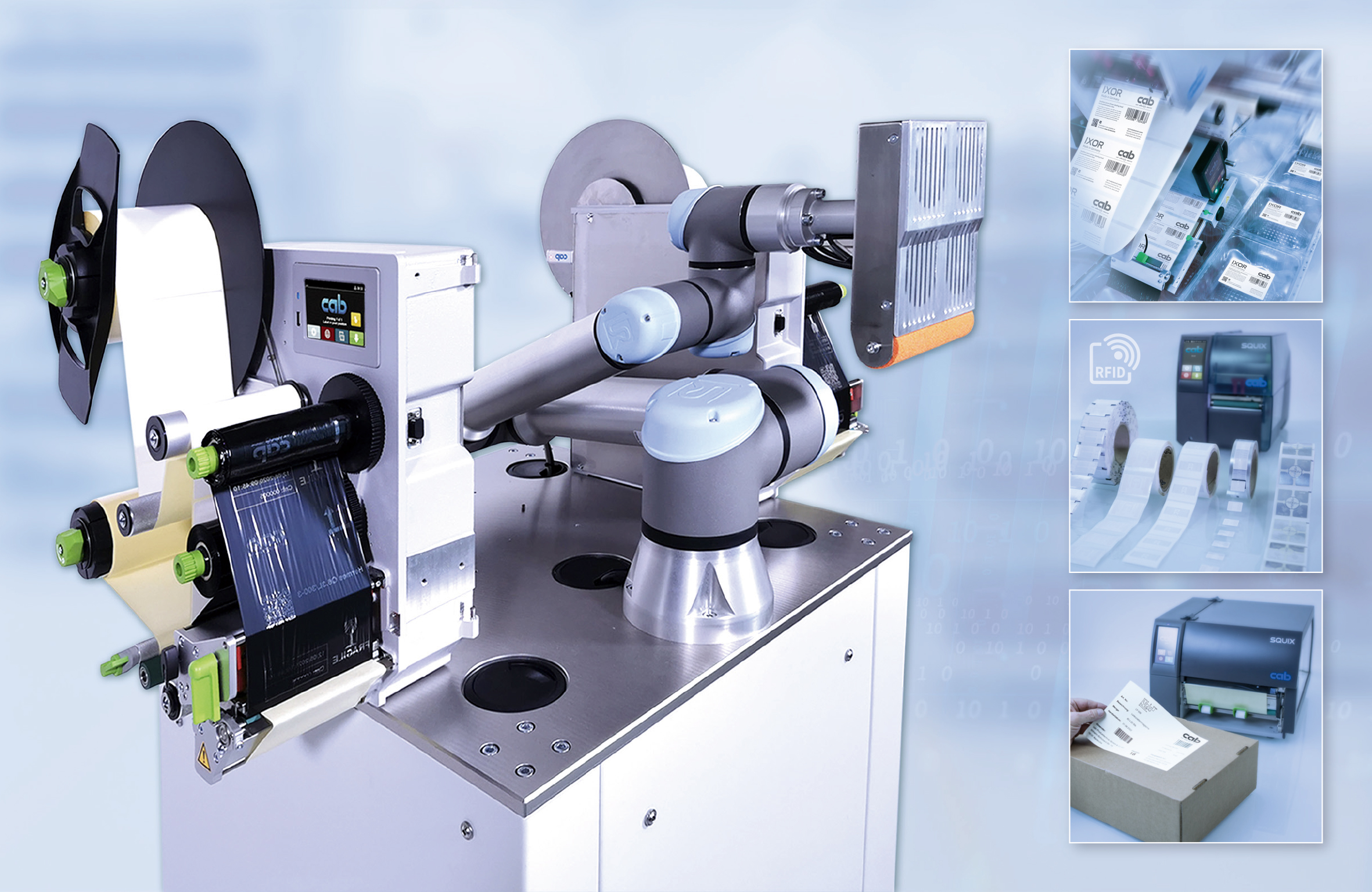
Bild: Cab Produkttechnik GmbH & Co KG
Egal, ob Etiketten nach dem Druck automatisch auf ein Objekt gedrückt, gerollt oder geblasen werden sollen, auf der Seite oder über Eck – die Druckeinheiten der Hermes-Q-Serie lassen sich individuell mit einem Applikator kombinieren. Der Cobot ist dabei in der Lage, z.B. Paletten punktgenau zu kennzeichnen.











