Inline-Achskontrolle mit Bildverarbeitung und Cobots
Roboter-Duo prüft Achsen
Kollaborative Roboter sind einfach zu programmieren und auch in direkter Nähe zu einem Bediener sicher zu betreiben. Im Zusammenspiel mit einer Bildverarbeitung lassen sich aber auch leistungsfähige und kompakte Inline-Prüfsysteme umsetzen, die sich kostengünstig für neue Prüftypen und zukünftige Prüfaufgaben erweitern lassen.
")
Der Kamerasensor auf dem Cobot erreicht auch Positionen, die mit fest oder auf Linearantrieben installierten Kameras nicht geprüft werden können. (Bild: Industrial Vision Systems Ltd.)
Die bei traditionellen Industrierobotern nötige Sicherheitstechnik ist beim Einsatz von kollaborativen Robotern (Cobots) in der Regel nicht erforderlich. Die daraus entstehenden Kosten- und Platzvorteile lassen sich auch in industriellen Bildverarbeitungsanwendungen gewinnbringend nutzen. Bei der britischen Firma IVS wurde eine ganze Serie von Inline-Prüfsystemen entworfen, die Bildverarbeitung in Verbindung mit Cobots zum Einsatz bringt. Basis für die realisierten Sichtprüfzellen bilden die Modelle UR3, UR5 und UR10 von Universal Robots.
Prüfung von Achsbaugruppen
In einem Kundenprojekt für einen Tier-1-Zulieferer der Automobilindustrie wird ein UR10-Roboter-Duo verwendet, um auch für größere Baugruppen, wie sie im Automobilbau üblich sind, die erforderliche Flexibilität bereitstellen zu können. In der Prüfzelle werden Qualität und Vollständigkeit des Zusammenbaus einer Vielzahl von Produktvarianten von Achsbaugruppen optisch überprüft, um mögliche Fehler insbesondere in den manuellen und teil-automatisierten Montageschritten zu identifizieren. Die montierten Baugruppen stehen auf einer speziellen Transportpalette und werden der Prüfzelle für die Endkontrolle autonom zugeführt. Die Typauswahl erfolgt automatisch durch Abfrage eines SQL-basierten Fabrikinformationssystems. Alternativ kann ein Werker einen Barcode am Prüfteil scannen und damit das zugehörige Prüfprogramm in der Bildverarbeitung initialisieren. Aufgrund der Baugruppengröße und des Gesamtgewichts der Kombination aus Bauteil und Bauträger ist immer mit kleineren Abweichungen der Bauteilposition zu rechnen. Daher wird in einem ersten Initialisierungsschritt durch Anfahren einer definierten Referenzposition eine globale Positionskorrektur der im Prüfprogramm hinterlegten Bahndaten vorgenommen. Anschließend fahren die zwei UR10-Roboter jeweils zwei Dutzend Prüfpositionen parallel an. Am Roboterkopf sitzen zwei GigE-Kameras mit HD-Auflösung (1x Farbe, 1x monochrom) und ein flexibel steuerbares um die Kameras angeordnetes LED-Beleuchtungs-Array. Zusätzlich ist eine Laserlinie mit einem Öffnungswinkel von 15° montiert, die sowohl bei der Kantendetektion, als auch bei der Kontrolle eines möglichen Bauteil-Versatzes entlang der Z-Achse dynamisch zum Einsatz kommt. Zu den typischen Prüfaufgaben gehört u.a. die visuelle Inspektion von Schraubverbindungen, das Prüfen auf Vorhandensein von Unterbaugruppen sowie deren korrekter Montage. Die Prüfergebnisse werden zusammen mit den Messwerten kontinuierlich in einer Datei gespeichert. Zusätzlich werden Kamerabilder einzelner ausgewählter Prüfpositionen zusammen mit den zugehörigen Prüfergebnissen archiviert, um zu einem späteren Zeitpunkt als Referenzinformation für eine kontinuierliche Optimierung des Prüfprozesses herangezogen werden zu können.
")
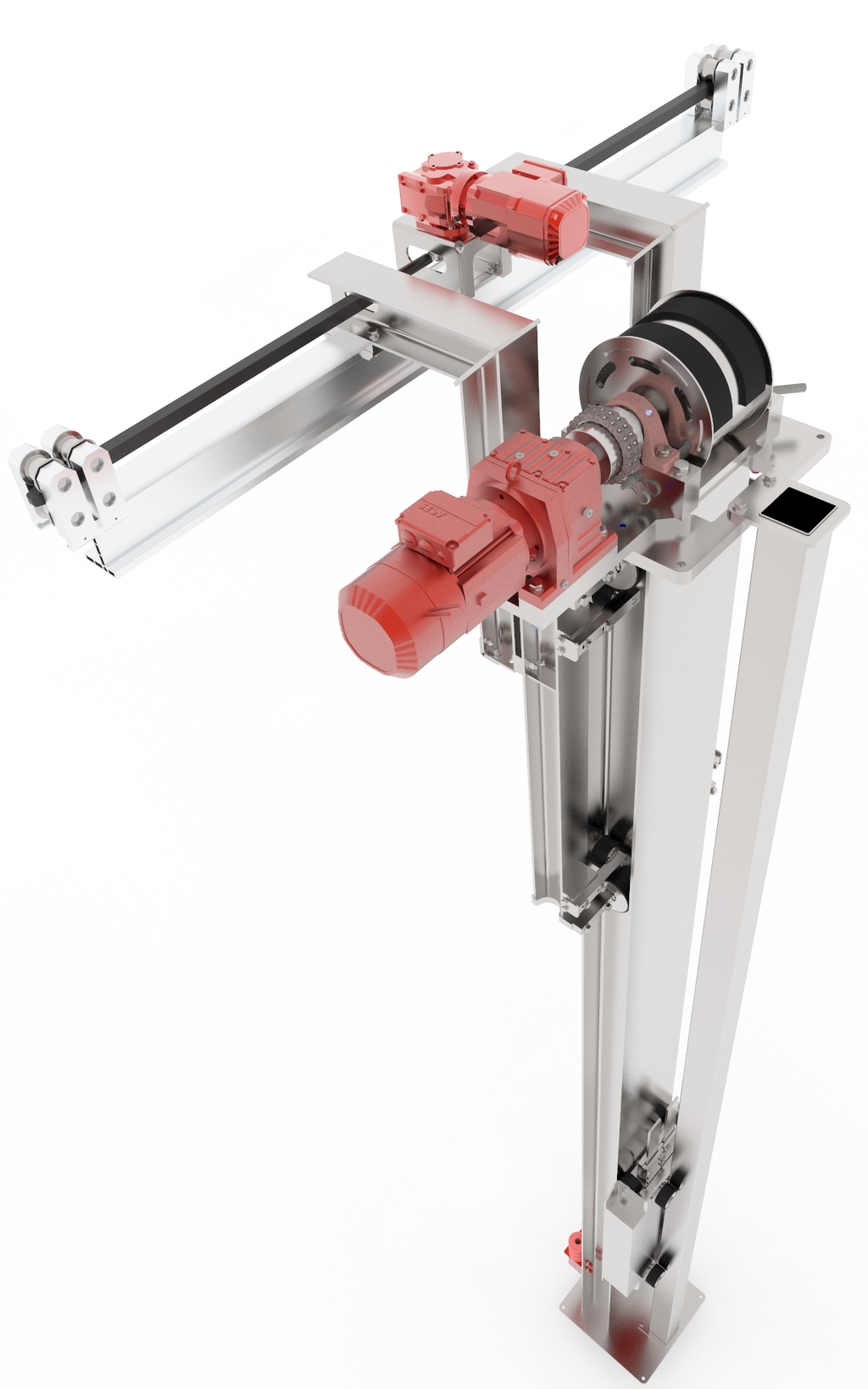
Roboterkopf mit zwei HD-Kameras, LED-Array und Laserlinie (Bild: Industrial Vision Systems Ltd.)
Flexible System-Architektur
Um den Genauigkeitsanforderungen zu entsprechen, müssen die Kameras vereinzelt sehr nahe an die zu prüfenden Stellen geführt werden. Durch das kleine Bildfeld lässt sich allerdings die Genauigkeit der Messung entscheidend steigern. Die Roboter fahren die Kameras dabei auch an Positionen, die man in einer Prüfzelle mit fest installierten Kameras oder mit Kameras montiert auf Linearantrieben nicht erreichen würde. Durch das dynamische Anfahren der Prüfpositionen mit den am Roboter montierten Kameras entfällt auch die Notwendigkeit für teure und mechanisch präzise Kamerahalterungen. Mit Roboterunterstützung lassen sich problemlos unterschiedlich große Prüfteile visuell inspizieren, ohne dass die Prüfvorrichtung in irgendeiner Form mechanisch umgerüstet werden müsste. Bereits bei der Konstruktion haben sich die verantwortlichen Ingenieure anhand des 3D-Modells der Zelle Gedanken über die möglichen Verfahrwege gemacht. Im Mittelpunkt der Betrachtungen stand das Ziel, mit einer optimierten Wegeplanung möglichst oft beide kollaborativen Roboter parallel fahren zu können, um die Prüfleistung nochmals deutlich zu erhöhen. Dabei geht es nicht nur um den rein quantitativen Aspekt eines erhöhten Durchsatzes innerhalb der zur Verfügung stehenden Taktzeit. Die beiden Roboter können sich im Prüfprozess zusätzlich qualitativ bei der Bildaufnahme aktiv unterstützen, indem zur Ausleuchtung eines Prüfbereichs der zweite Roboter als weitere seitliche Lichtquelle temporär hinzugezogen wird. Obwohl es sich um eine umfangreiche Prüfsequenz handelt, wurde die Struktur so angelegt, dass der Endanwender das System einfach verstehen und mit minimalem Training für zukünftige Prüfaufgaben mit rein interaktiver Konfiguration erweitern kann.
")
(Bild: Industrial Vision Systems Ltd.)
Das bei IVS für die Konstruktion der Sichtprüfzelle verantwortliche Engineering-Team hat sich von Projektbeginn an ausführlich mit der Risikoabschätzung beim Einsatz von Cobots beschäftigt, um dem Anwender ein Höchstmaß an Sicherheit zu liefern. Die bei Konstruktion und Programmierung der Prüfzelle gewonnenen Erkenntnisse wurden im Ratgeber ´Essential Guide To Risk Assessment for Collaborative Robots´ veröffentlicht.