Automatisierte Kultivierung von Stammzellen
Roboter forscht
Die Stammzellforschung nimmt in der aktuellen medizinischen Forschung und bei der Entwicklung neuartiger Wirkstoffe eine entscheidende Funktion ein. Ein Pilotprojekt aus diesem Umfeld erforscht und kultiviert in einer vollautomatisierten Anlage Stammzellen mithilfe eines Industrieroboters.
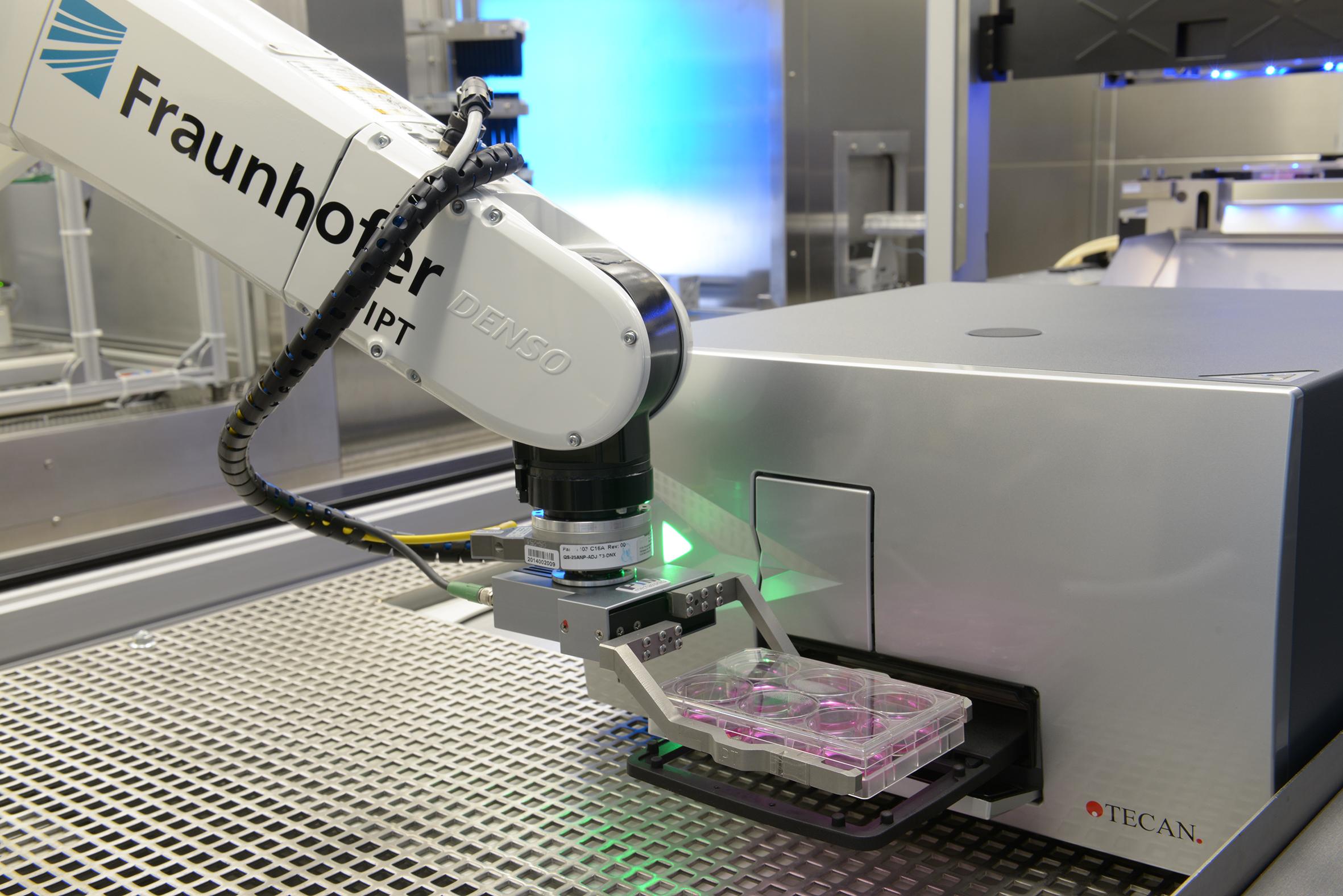
Die Stemcelldiscovery ist eine vollautomatisierte und geschlossene, aber flexibel agierende Plattform für die Kultivierung von Stammzellen. (Bild: Fraunhofer-Institut für Produktionstechnologie IPT)
Im Rahmen des Pilotprojekets Stemcelldiscovery sollen in einer vollautomatisierten Anlage mithilfe eines VS-087-Roboters von Denso Robotics neue Wege in der Erforschung und Kultivierung von Stammzellen beschritten werden. Grundlage des Projektes sind mesenchymale Stammzellen (kurz MSC), d.h. reife Stammzellen, die sich aus dem Gewebe erwachsener Menschen gewinnen lassen und sich daher im Gegensatz zu embryonalen Stammzellen auf ethisch vertretbare Art und Weise isolieren lassen. Diese Stammzellen sind aufgrund ihrer besonderen Eigenschaften für die regenerative Zelltherapie interessant, denn sie sind in der Lage, viele neue Zelltypen zu bilden, andere Zellen zum Wachstum anzuregen und positiv auf das Immunsystem eines Menschen einzuwirken. „Die Kultivierung dieser Zellen dauert allerdings lange und ist arbeitsintensiv“, berichtet Michael Kulik, der das Projekt am Aachener Fraunhofer-Institut für Produktionstechnologie IPT als Gruppenleiter betreut. „Wir arbeiten mit Zellen vieler verschiedener Spender, die natürlich unterschiedliche biologische Merkmale aufweisen. Und bei manuell erstellten Zellkulturen wird die Variabilität oft dadurch verstärkt, dass Handhabungsabläufe unterschiedlich durchgeführt werden.“ Menschliche Interaktion erhöht das Fehlerrisiko und erschwert die Reproduzierbarkeit. Nicht zuletzt sind Zellkulturen lebendes Material, sodass eine Reinraumumgebung entscheidend ist und besondere Anforderungen für die eingesetzten Geräte gelten.
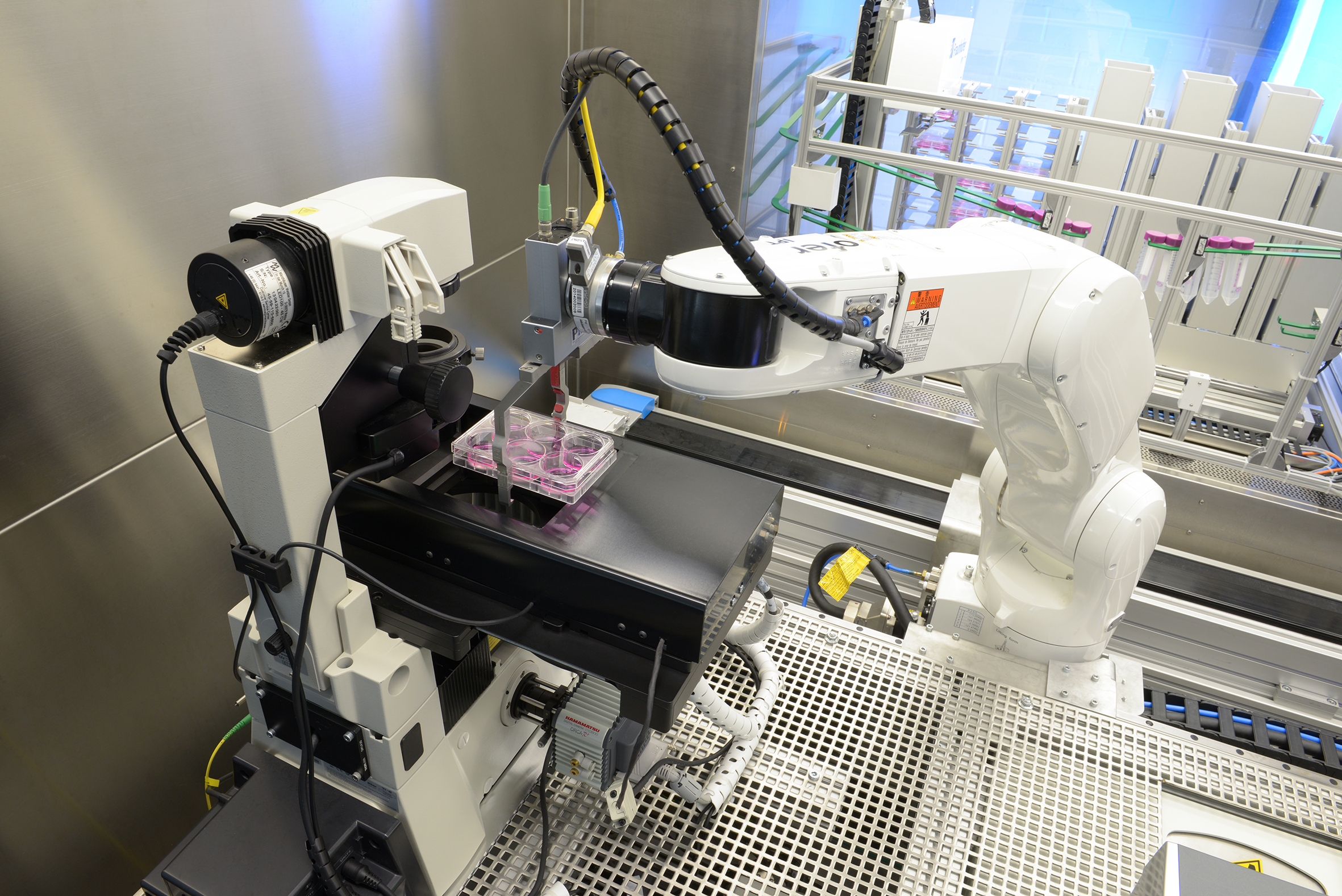
Vollautomatisierte Plattform
Diese Herausforderungen soll nun die Stemcelldiscovery lösen – eine vollautomatisierte und geschlossene, aber flexibel agierende Plattform für die Kultivierung von Stammzellen. Hier werden MSCs vermehrt und erforscht, außerdem werden verschiedene Laborprozesse durchgeführt – von der Kultivierung der Zellen bis zur Generierung experimenteller Daten. Entscheidende Erfolgsfaktoren der Anlage sind die leichte Integrierbarkeit aller Geräte, die gleichmäßige, präzise Reproduzierbarkeit der Abläufe, eine individuelle, modulare Steuerung der Prozesse, die hohe Qualität der Zellprodukte sowie die Integration und Weiterentwicklung der Messtechnik zur Qualitätssicherung und Analyse. Eine zentrale Funktion in der Anlage übernimmt dabei der Roboter. Er fungiert als flexible Handling-Einheit für alle Transporte innerhalb der Plattform, so transportiert er Zellkulturen in Multiwell-Platten und Falcon Tubes zwischen den einzelnen Prozessier- sowie Messgeräten und erlaubt eine hochpräzise Positionierung derselben. Diese Genauigkeit ist insbesondere am Mikroskop wichtig, wo das Zellkulturgefäß zusätzlich vom Roboter umgriffen wird, um dieses in die dafür vorgesehene Halterung einzusetzen. Die Flexibilität des Roboters bewährt sich auch bei der Ressourcenbereitstellung, wie dem Transportieren von Pipettenspitzen vom Magazin zur Liquid Handling Unit. Darüber hinaus übernimmt der Roboter alternativ das Shaken der Kulturen: Hierbei kommt es auf eine gleichmäßige und reproduzierbare Umsetzung an. So schwenkt der Roboter die Zellprodukte stets mit derselben Geschwindigkeit und Bewegung – ein entscheidender Faktor, denn durch ungleichmäßige Bewegung passiert es unter Umständen, dass Zellen sich an den Rändern des Gefäßes festsetzen und so zu einem veränderten Wachstum führen.
Eine zentrale Funktion in der Stemcelldiscovery-Anlage übernimmt ein VS-087-Roboters von Denso. (Bild: Fraunhofer-Institut für Produktionstechnologie IPT)
Flexibler Roboter
Um die manuellen Prozessschritte auf der automatisierten Anlage abzubilden, war die Integration verschiedener Geräte in die Anlage notwendig. Die Auswahl der Geräte stand lange vor der Software-Entwicklung fest, sodass vor allem auf eine flexible Integration zu achten war. Die Forschergruppe entschied sich für den Roboter, weil er sich leicht integrieren und programmieren lässt. Nicht zuletzt war die Reinraumtauglichkeit ausschlaggebend. Aufgrund der kompakten Bauweise des Roboters ließ sich eine platzsparende Anlage einrichten. Der hierfür entwickelte Multifunktionsgreifer lässt sich durch die Roboterkinematik an jeden Ort der Anlage bewegen und erlaubt ein Höchstmaß an Präzision. Die Stemcelldiscovery basiert auf dem Zusammenspiel unterschiedlicher Geräte, sodass die flexible Steuerung eine entscheidende Rolle spielt. „Uns war eine hohe Flexibilität des Gesamtsystems wichtig“, berichtet Sven Jung, wissenschaftlicher Mitarbeiter des Projektes und für die Programmierung zuständig. „Deshalb haben wir eine dienstbasierte, flexibel konfigurierbare Prozess-Software entwickelt, die alle Abläufe kontrolliert und adaptiv auf diese reagiert, wie z.B. beim Wachstum der Zellen.“ Die parametrisierbaren Dienste werden über ein Integration Framework aus allen Geräten extrahiert und ermöglichen eine modulare Ausführung von Prozessschritten – je nach Bedarf.
Übersichtliche Benutzeroberfläche
Über eine intuitive Benutzeroberfläche lassen sich die zur Verfügung stehenden Dienste steuern oder zu beliebigen, komplexen Abläufen zusammenstellen. So sind für den User alle Geräte – vom Mikroskop über den Roboter, von der Liquid Handling Unit bis zum Inkubator und verschiedene Magazine – über eine grafische Benutzeroberfläche steuerbar. Die Software ist in der höheren Programmiersprache C# geschrieben, die es ermöglicht, komplexe logische Zusammenhänge zu abstrahieren und eine objektorientierte Programmierung zu realisieren. Der Roboter ist ebenfalls über das Integration Framework an die Anlage angebunden. Durch die bereitgestellte Roboterschnittstelle lassen sich seine Dienste aus der realen Welt abbilden und ermöglichen so eine intuitive Nutzung des Roboters. Er wird über den eingebauten RC8-Controller gesteuert, die Schnittstellenkommunikation basiert auf ORiN2 und der Möglichkeit der Ansteuerung per C#, die sich sehr gut in die Software-Architektur einbetten lässt. Die Software übernimmt auch die gesamte Überwachung des Roboters, sodass etwaige Prozessschwankungen sich sofort registrieren und beheben lassen. Mit diesem modularen Konzept liefert die Stemcelldiscovery wertvolle Erfahrungen über innovative Steuerungstechniken im Bereich Laborautomatisierung.

Die Anlage soll durch Anwendung statistischer Methoden zu neuen Kenntnissen für innovative Therapien beitragen. (Bild: Fraunhofer-Institut für Produktionstechnologie IPT)
Fazit
Die Plattform ermöglicht aufgrund der serviceorientierten Architektur sowie der flexiblen Handhabung durch den Roboter eine einfache Umsetzung von verschiedenen Prozessen, sodass künftig neben anderen Zellkulturen auch die Integration von externen Usern mit nur kurzer Vorlaufzeit möglich ist. Dann könnten standardisierte und validierte Funktionsbausteine zur Verfügung stehen, die für diese Anwender noch mehr Effizienz und Qualität bieten, um Zellprodukte im industriellen Standard zu produzieren. In Zukunft soll die Anlage durch Anwendung statistischer Methoden (Big Data and Analytics) zu neuen Kenntnissen beitragen, um die Suche nach innovativen Therapien zu begünstigen und zu beschleunigen.











