Deformierbares oberflächenbasiertes Matching in der Bildverarbeitung
Verformte Objekte präzise greifen
Das exakte Handling von Gegenständen ist unabdingbare Voraussetzung für effiziente Produktionsprozesse in der Robotik. Dies gilt insbesondere dann, wenn die Objekte leicht verformbar sind und sich deshalb nur schwer greifen lassen. Eine praktikable Lösung bietet das deformierbare oberflächenbasierte Matching, das Roboter verformte Gegenstände im dreidimensionalen Raum erkennen, punktgenau lokalisieren und sicher greifen lässt.
Produktionsprozesse in der Robotik stellen hohe Anforderungen an das Handling. (Bild: MVTec Software GmbH)
Klassische – also nicht deformierbare – oberflächenbasierte Matching-Techniken unterstützen Fertigungsroboter schon seit Längerem beim gezielten Handling von starren, nicht verformbaren 3D-Objekten wie Werkstücken aus hartem Metall. Dabei werden mit einer oder mehreren Kameras digitale Bilddaten aufgenommen und in einer Machine-Vision-Software verarbeitet. So ist es möglich, die Objekte zu erkennen und deren Lage im dreidimensionalen Raum präzise zu bestimmen. Zudem lassen sich damit geometrische Eigenschaften komplexer 3D-Objekte messen sowie Defekte feststellen und lokalisieren. Das deformierbare oberflächenbasierte Matching geht noch einen Schritt weiter: Es erlaubt Robotern, auch Gegenstände aus verformbarem Material zu identifizieren und zu greifen. So hat die Software zu berücksichtigen, dass die Greifpunkte von deformierten und intakten Objekten aufgrund der Verzerrungen stark voneinander abweichen. Ein Beispiel aus der Lebensmittelindustrie: In hochautomatisierten Brotfabriken nehmen Roboter frisch gebackene Brezeln vom Fließband und legen sie in die Verpackung. Backwaren sehen naturgemäß nicht identisch aus, sie sind also im Vergleich zueinander immer deformiert. Roboter haben möglicherweise Schiwierigkeiten, solche Objekte richtig zu erkennen und aufzunehmen. Die Machine-Vision-Software ist nun in der Lage, die Abweichung festzustellen und mithilfe eines angepassten deformierten Modells der Brezel auch entsprechende Greifpunkte zu bestimmen. Dabei erfüllt das 3D-Matching zwei Aufgaben: Es ermittelt nicht nur die korrekte Greifposition für den Roboter, sondern erkennt auch fehlerhafte Produkte, die sich dann im Rahmen der Qualitätssicherung zuverlässig aussortieren lassen. Ein weiterer Anwendungsfall ist das Erkennen und präzise Greifen von falsch gebogenen – und damit deformierten – Blechen beispielsweise in der Automobilindustrie. In der Verarbeitung von heißem, flüssigem Metall kommt das Matching-Verfahren ebenfalls zum Einsatz: Kühlt das Metall nach dem Gießvorgang ab, kommt es möglicherweise zu leichten Verformungen. Diese erkennt die Machine-Vision-Software problemlos und macht so den Greifprozess für den Roboter sicherer.
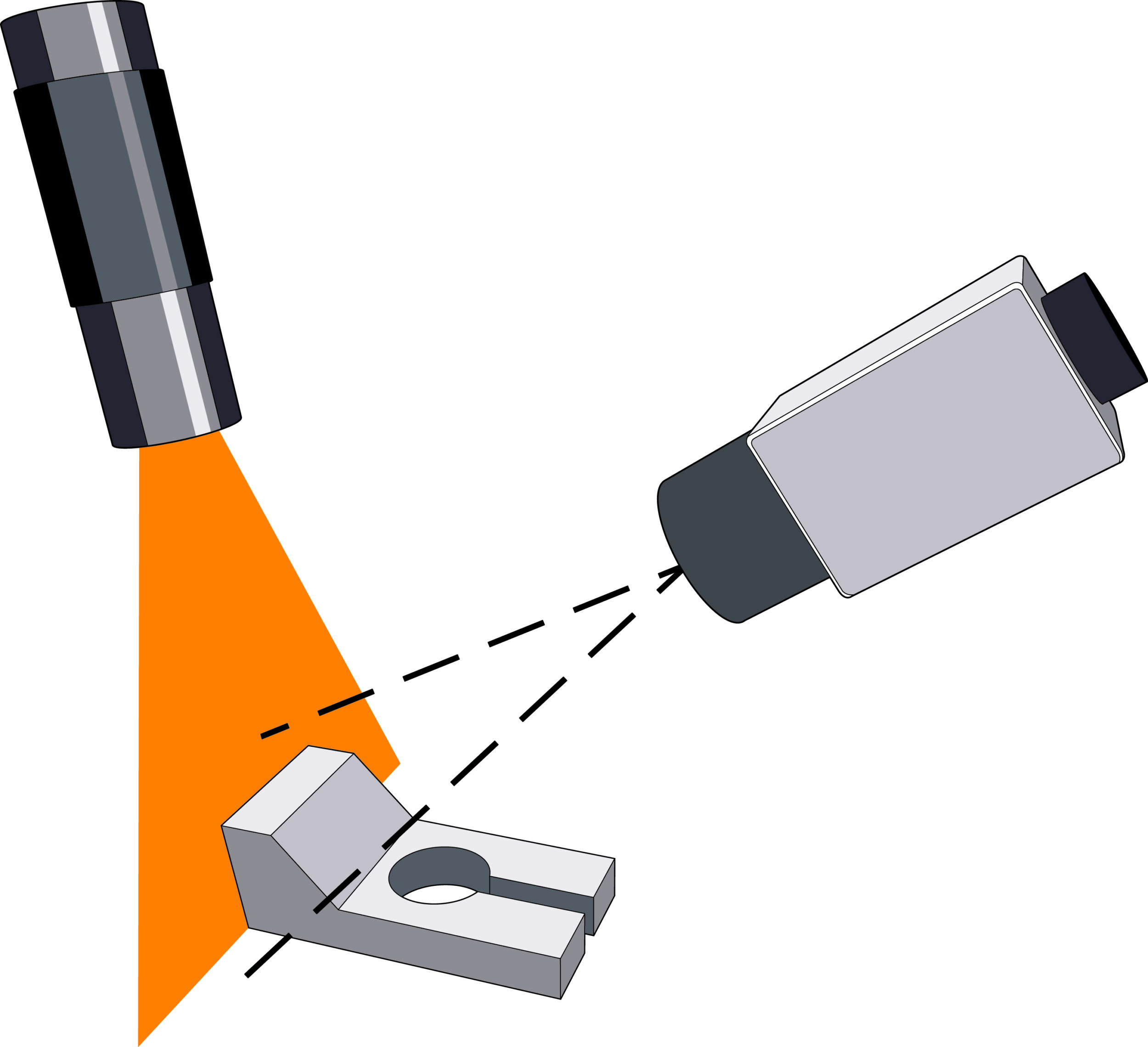
Mit dem Lichtschnittverfahren lassen sich 3D-Punktewolken erzeugen. (Bild: MVTec Software GmbH)
Exakte 3D-Punktwolken
Um die Lage von verformten Objekten im Raum zuverlässig zu bestimmen, benötigen Techniken für deformierbares oberflächenbasiertes Matching granulare 3D-Daten in Form von dreidimensionalen Punktwolken. Die Daten lassen sich beispielsweise durch den Einsatz von 3D-Kameras generieren. Stehen solche, relativ teuren Geräte nicht zur Verfügung, bieten moderne Machine-Vision-Systeme alternative Möglichkeiten zur Erzeugung von 3D-Punktwolken. Mit Halcon, der Bildverarbeitungs-Software von MVTec, lassen sich auch zwei oder mehrere herkömmliche Kameras dafür nutzen. Je mehr Bildeinzugsgeräte hierfür im Einsatz sind, desto genauer lässt sich die Punktwolke durch die Vermeidung von Überschattungseffekten bestimmen. Dadurch steigt auch die Erkennungsrate von ruhenden Objekten – beispielsweise beim Bin Picking, dem Griff eines Roboters nach Dingen aus einer Kiste. Eine weitere Machine-Vision-Technik – ebenfalls von der Bildverarbeitungs-Software unterstützt – ist das sogenannte Lichtschnittverfahren, das sich für bewegte Objekte, also beispielsweise auf einem Fließband, eignet und für das bereits eine einzelne konventionelle Kamera ausreicht. Dabei wirft ein Laser auf den zu identifizierenden Gegenstand eine Linie, die sich durch die Bewegung verformt. Über die Art der Verformung lassen sich nun präzise 3D-Daten generieren. Ein Problem dabei sind häufig auftretende Störinformationen, die ein Bildrauschen verursachen und damit die Erkennung beeinträchtigen. Ausgefeilte Bildverarbeitungsalgorithmen sind jedoch in der Lage, Objekte trotz verrauschter 3D-Daten exakt zu lokalisieren. Zudem identifizieren moderne Matching-Verfahren auch flache Gegenstände aufgrund von zusätzlichen Kanteninformationen einwandfrei. Davon profitiert beispielsweise der Online-Versandhandel: Hier lassen sich unterschiedliche Pakete mithilfe der Bildverarbeitung sicher handeln und damit automatisiert kommissionieren, transportieren sowie verladen.

Aufgrund des deformierbaren oberflächenbasierten Matchings ist ein Roboter in der Lage, verformte Backwaren sicher zu greifen. (Bild: MVTec Software GmbH)
Fazit
Das korrekte Handling von verformten Gegenständen ist eine Herausforderung in automatisierten Produktionsprozessen. Abhilfe schafft das deformierbare oberflächenbasierte Matching mit den dazugehörigen Verfahren zur Erzeugung entsprechender 3D-Punktwolken. Roboter sind damit in der Lage, Objekte im 3D-Raum präzise zu erkennen, zu lokalisieren und zu greifen, was zu sicheren und effizienten Fertigungsabläufen beiträgt.











