Für Anwender, die wenig Erfahrung mit der Roboterprogrammierung haben, hat sich in den vergangenen Jahren Teach-in über Teach-Punkte am Werkstück als einfache und effiziente Herangehensweise erwiesen. Bei schwer erreichbaren Teach-Punkten kommt diese Methode aber an ihre Grenzen, ebenso bei komplexen Bauteilgeometrien, denn dann müssen sehr viele Teach-Punkte angelegt werden. Hier ist diese Herangehensweise nur dann wirtschaftlich, wenn anschließend eine große Anzahl der gleichen Werkstücke mit dem Roboter bearbeitet werden soll. Für Kleinserien dagegen ist der Einsatz von Robotern nicht attraktiv. Das ist schade, denn gerade dort bleibt bei der Oberflächenbearbeitung für den Menschen oft belastende Handarbeit, deren Zeitaufwand und Qualität nur bedingt planbar sind. ArtiMinds geht mit der Robot Programming Suite (RPS) einen alternativen Weg. Mit der grafischen Bedienoberfläche und fertigen Programmbausteinen lassen sich Roboter einfacher und effizienter programmieren. Außerdem sorgt die RPS für eine reibungslose Integration von Sensoren und Werkzeugen, ohne dass Fachwissen für diese Tools oder Kenntnisse in der jeweiligen Robotersprache vorhanden sein müssen.

In drei Schritten zum Ziel
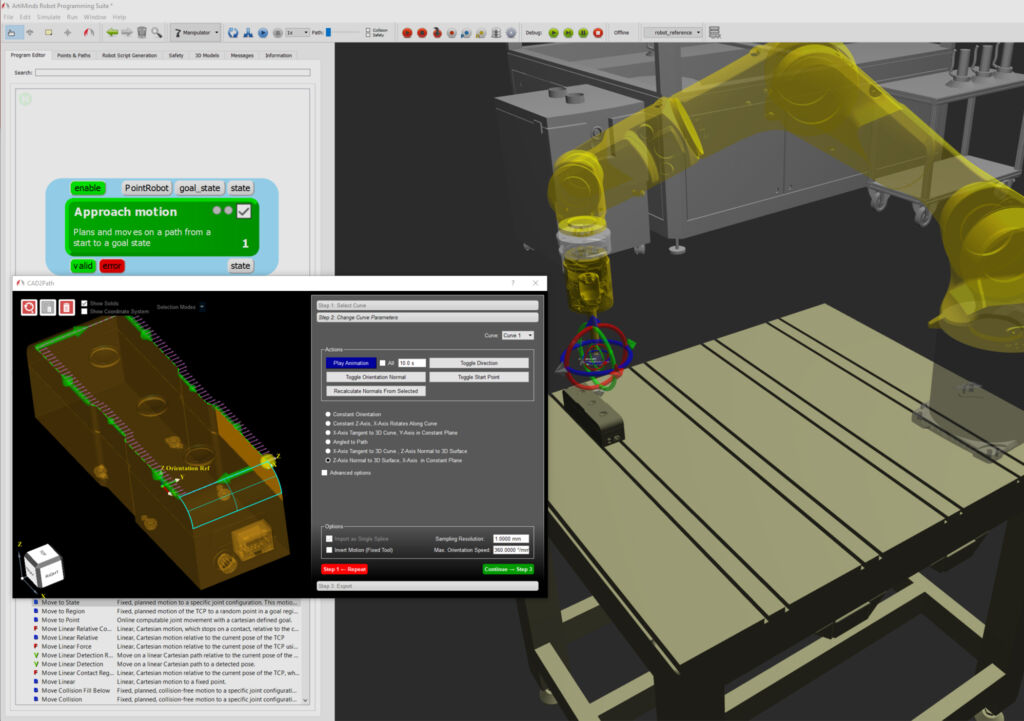
Die RPS arbeitet beim Programmieren von Pfaden für die Oberflächenbearbeitung mit ohnehin vorhandenen CAD-Modellen. Diese lädt der Anwender im ersten Schritt in die RPS und definiert dann Referenzbahnen, z.B. über Kantenauswahl des CAD-Modells, durch Generierung von Mäandern auf der ausgewählten Fläche oder über den Import von Pfaden, die bereits in der CAD-Software vorbereitet wurden. Referenzbahnen lassen sich weiter editieren, um z.B. eine zusätzliche An- oder Abrückbewegung zu realisieren. Im zweiten Schritt wählt der Anwender dann für jede Referenzbahn aus verschiedenen Vorschlägen aus, wie ein bestimmtes Werkzeug entlang dieser Bahn bewegt werden soll. Klassische Anwendungsszenarien im Zusammenhang mit der Oberflächenbearbeitung sind z.B. Entgraten, Schleifen, Bürsten, Polieren oder zerstörungsfreies Prüfen. Im dritten Schritt übersetzt die RPS im Hintergrund die erstellte Software in ein natives Roboterprogramm, das dann ohne zusätzliche Hardware auf der Robotersteuerung des Anwenders ausgeführt werden kann.
Roboter ohne Vorerfahrung programmieren
Mit dieser Methode wird der Einsatz von Robotern nun auch für Unternehmen nutzbar, die bislang keinerlei oder kaum Erfahrung mit Robotern hatten. Das Roboterprogramm bietet gängige Standardmethoden zum Vermessen von Werkzeugen oder dem Kalibrieren von Referenzpunkten, wodurch eine zielgerichtete Inbetriebnahme möglich wird. Eine aufwendige Roboterprogrammierung via Zeilencode ist nicht notwendig. Im Gegensatz zum Teach-in-Verfahren legt der Nutzer wichtige Prozessparameter, wie z.B. Anstellwinkel oder die aufzubringende Kraft des Werkzeugs explizit fest und kann diese jederzeit ändern, wodurch der Prozess leichter eingefahren werden kann.
In der Software ist bereits jede Menge Prozess-Knowhow integriert. Damit werden Bearbeitungsprozesse unabhängiger von der Expertise einzelner Mitarbeiter. In Zeiten des Fachkräftemangels ein schlagkräftiges Argument. Ein Beispiel: Beim Entgraten wird automatisch ausgenutzt, dass das Werkzeug bei gleichbleibendem Anstellwinkel um die Drehachse beliebig positioniert werden kann. Bei einer zerstörungsfreien Prüfung ist es notwendig, dass der Sensor plan auf der zu prüfenden Fläche aufliegt, er muss aber nicht in Richtung der Bewegung ausgerichtet werden. Die automatische Berechnung optimierter Roboterbahnen ermöglicht, dass der Arbeitsbereich ausgenutzt wird, um auch schwer zugängliche Stellen an einem Werkstück zu bearbeiten.
Programme einfach anpassen
Ein Vorteil ist auch, dass die RPS übergreifend von der Planung über die Programmierung bis hin zum Betrieb eingesetzt wird. Dadurch ist eine Rückkopplung direkt aus dem Prozess und eine entsprechende Prozessverbesserung möglich. Zudem erlaubt die Verknüpfung mit der automatischen Datenerfassung in ArtiMinds Learning and Analytics for Robots (kurz: LAR) dem Nutzer, Testreihen mit unterschiedlichen Prozessparametern zu vergleichen und zielgerichtet Verbesserungspotential abzuleiten. Man muss also nicht mehr allein anhand des Ergebnisses Rückschlüsse auf den Prozess ziehen. Diese Methode kann insbesondere dann ausgesprochen nützlich sein, wenn Testreihen teuer sind oder der Prozess schwer einsehbar ist.
Sensorik integrieren, Fehlstellen auspolieren
Praktisch ist zudem, dass sich externe Sensorik einfach integrieren lässt. Gerade über Kraftregelung entstehen vielfältige Möglichkeiten, Prozesse robust gegenüber kleineren Abweichungen im Werkstück oder der Zuführung zu gestalten. Durch die einfache Kombination mit 2D- oder 3D-Sensorik können Roboterbewegungen automatisch angepasst werden, um größere Abweichungen zu kompensieren. Visomax Coating, ein Unternehmen, das Schleif- und Polierprozesse entwickelt, nutzt diese Möglichkeit z.B.beim kraftgeregelten Polieren von Fehlstellen an lackierten Oberflächen. Dazu musste nicht nur der Polierprozess selbst in der Roboteranwendung realisiert, sondern auch die notwendigen Sensorikkomponenten integriert werden. Eine Kamera erkennt die Fehlstellen auf dem Bauteil, der Roboter fährt die Koordinaten der Fehlstellen kraftgeregelt an und poliert sie dann aus. Ein solches Vorgehen ist bei herkömmlicher Roboterprogrammierung wenn überhaupt nur mit immensem Aufwand denkbar.
Robotergestütztes Bearbeiten von komplexen Geometrien
Moderne Werkstoffe ermöglichen die Produktion langlebiger Werkstücke mit hochkomplexen Geometrien. Nachbearbeitungen, wie Entgraten oder die Oberflächenbearbeitung solcher Werkstücke, sind dann oft aufwendig, gerade wenn es sich um sehr große Bauteile handelt. Das amerikanische Unternehmen Green Tweed, das ein vielfältiges Portfolio an Thermoplast- und Verbundwerkstoffkomponenten in relativ kleinen Chargen produziert, konnte mithilfe der RPS selbst eine flexible Roboterentgratzelle zur Oberflächenbearbeitung von wechselnden, komplexen Bauteilen erstellen. Die Bearbeitungszeit der jeweiligen Bauteile hat sich im konkreten Anwendungsfall dadurch mehr als halbiert. Der Anwender freut sich aber auch, dass er durch die neue Technik nun flexibler agieren kann.
Robotereinsatz auch bei Kleinserien
Das Unternehmen Maus Modell- und Formenbau aus Karlsruhe produziert Aluminiumwerkzeuge zur Herstellung von Kunststoffkörpern in einem speziellen Rotationsgießverfahren. Digitalisierung spielt für das Unternehmen eine wichtige Rolle in Bezug auf die Planbarkeit der Prozesse und um Mitarbeiter von schweren Aufgaben zu entlasten. Nach der Digitalisierung der Fräsmaschinen war eine automatisierte Lösung, die Mitarbeiter bei der Oberflächenbearbeitung unterstützt, der folgerichtige Schritt. Für die Programmierung arbeitet Maus vorwiegend mit der CAD2Path-Methode, um Linien aus CAD-Daten auf die Fläche des jeweiligen Bauteils zu projizieren. Dann gibt der Modell- und Formenbauer vor, wie und mit welcher Kraft der Roboter die Fläche abfahren und die Oberfläche schleifen soll.